ROS 2 Publish Real Time Factor (RTF)#
Learning Objectives#
This tutorial will demonstrate publishing the Real Time Factor (RTF) of Isaac Sim as a ROS2 Float 32 message.
Getting Started#
Important
Make sure to source your ROS 2 installation from the terminal before running Isaac Sim. If sourcing ROS 2 is a part of your bashrc then Isaac Sim can be run directly.
Enable the
omni.isaac.ros2_bridgeExtension in the Extension Manager window by navigating to Window > Extensions.
Publish RTF#
The RTF indicates how fast or slow simulation is running with respect to the real-time. It is calculated per frame as RTF = simulated_elapsed_time / real_elapsed_time. If RTF > 1, simulation time is running faster than wall clock time. If RTF < 1, the simulation is running slower than real-time.
Go to Isaac Utils > Common Omnigraphs > ROS2 Generic Publisher. The parameter pop-up window will appear.
Select Publish RTF as Float32 and click OK.
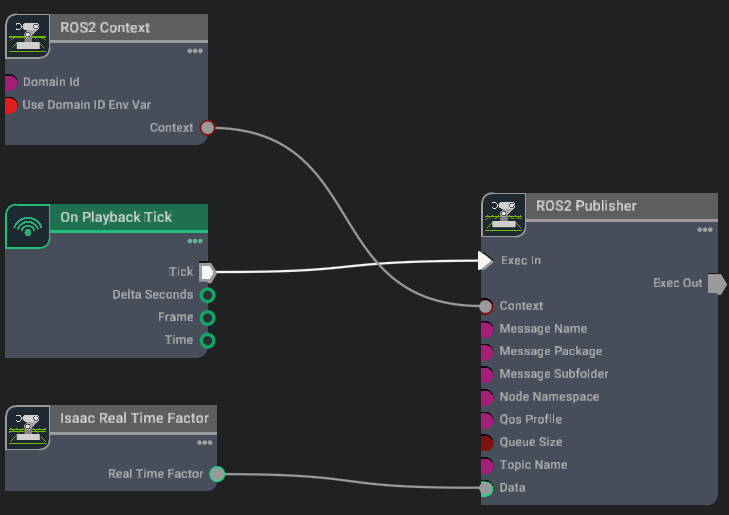
A new Action Graph will be created with the Isaac Real Time Factor node connected to a generic ROS2 Publisher node which is setup to publish
std_msgs/msg/Float32ROS messages.Select the Action Graph prim found at /Graph/ROS_GenericPub. Right click on it and choose Open Graph. The autogenerated graph should be match the following:
Click Play to start simulation.
In a ROS2-sourced terminal run the following command to view the RTF value published from Isaac Sim.
ros2 topic echo /topic
For an unloaded system, RTF should be close to 1.0.
Summary#
This tutorial covered using an OmniGraph shortcut to automatically generate a ROS2 RTF publisher graph.