OmniGraph: Contact Sensor Node#
Learning Objectives#
This tutorial details how to attach an contact sensor to a prim, and use the included Omniverse Isaac Sim OmniGraph nodes to read out data. After this tutorial, you will understand how to attach sensors to a simple cube and print out its contact sensor readings using OmniGraph.
10-15 Minute Tutorial
Getting Started#
Prerequisites
Review the GUI Tutorial series, specifically OmniGraph, prior to beginning this tutorial.
Build the Sim Environment#
Add a cube to the stage by Create > Mesh > Cube, select the cube and drag it up. Then select the cube and right click Add > Physics > Rigid Body with Colliders Preset.
Add a physics scene by Create > Physics > PhysicsScene.
Add a ground plane by Crete > Physics > GroundPlane.
Finally, add a contact sensor by selecting the cube, and select on the top menu Create > Isaac > Sensor > Contact Sensor.
Note
In general, sensors must be added to rigid body prims in order to correctly report data. The prims in this robot are already rigid bodies, so nothing must be done for this case.
OmniGraph setup
Now let’s set up the OmniGraph to collect readings from this sensor.
Create the new action graph by navigating to Window > Visual Scripting > Action Graph, and selecting New Action Graph in the new tab that opens.
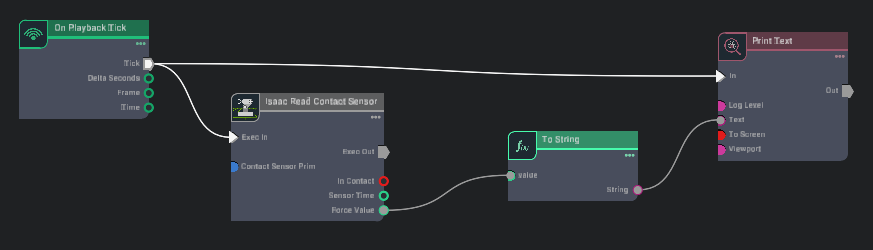
Now add the following nodes to the graph, and set their properties as follows:
On Playback Tick node executes the graph nodes every simulation timestep.
Isaac Read Contact Sensor to get the contact sensor readings. In the Property tab, set Contact Sensor Prim to /World/Cube/Contact_Sensor, to point to the location of the contact sensor prim.
To String node to convert the contact sensor readings to string format.
Print Text node to print the string readings. In the Property tab, set Log Level to Warning so that messages are visible in the terminal/console by default.
Connect the above nodes as follows to print out the contact sensor reading:
Now hit the Play button on the GUI. If set up correctly, the Omniverse Isaac Sim internal Console should read out the contact sensor’s force output.
Summary#
In this tutorial, we introduced the Isaac Read Contact Sensor and its functionality.
Further Reading#
To learn more about collecting LIDAR data: Using Sensors: LIDAR To learn about the IMU sensor, see Using Sensors: IMU