(DEPRECATED) Articulation Inspector Extension#
Warning
The Articulation Inspector as of 4.2.0 was be replaced by Physics Inspector. The Articulation Inspector is still be available, but will need to be manually enabled through the Extension Manager.
About#
The (DEPRECATED) Articulation Inspector Extension Extension is used to inspect the DOF Properties of a selected Articulation. This extension is useful when importing any new robot or to better understand the behaviors of an articulated system during simulation.
The simulator must have been active for at least one step in order to inspect the selected articulation. Toggle the PLAY button, if in doubt.
This extension is enabled by default. If it is ever disabled, it can be re-enabled from the Extension Manager by searching for omni.isaac.articulation_inspector.
To access this Extension, go to the top menu bar and click Isaac Utils > Workflows > Articulation Inspector.
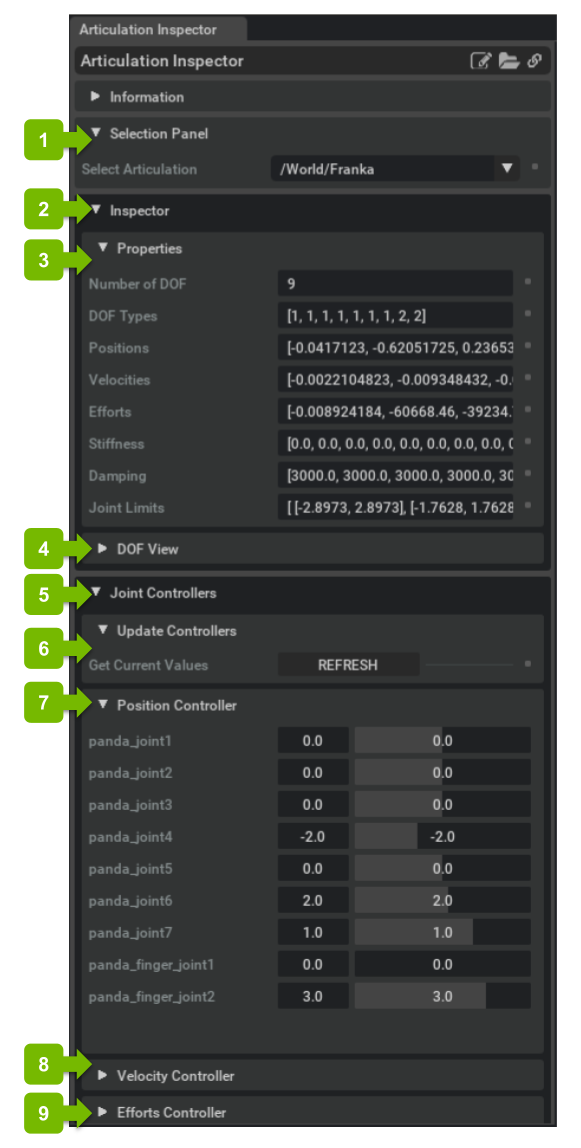
User Interface#
Ref # |
Item |
Description |
|---|---|---|
1 |
Selection Panel |
This panel holds utility functions for selecting and interacting with the Articulation.
|
— |
|
Dropdown Menu to select an Articulation Root. Simulation must be running to select.
|
2 |
Inspector Panel |
This panel holds the selected articulation’s Properties and DOF View groups.
|
3 |
Properties |
This panel contains all available metadata of an articulation. Each metadata field is read-only and can be copied by the user.
|
4 |
DOF View Group |
Each DOF panel contains sliders for modifying the position, velocity, gains, and efforts of each DOF.
|
5 |
Joint Controllers Panel |
This panel contains groups of sliders for modifying the target joint positions, velocities, and efforts of the selected articulation.
|
6 |
Update Controllers |
This panel contains buttons that trigger updates for the different controllers.
|
7 |
Joint Positions |
Group of sliders for modifying the target joint positions of the selected articulation.
|
8 |
Joint Velocities |
Group of sliders for modifying the target joint velocities of the selected articulation.
|
9 |
Joint Efforts |
Group of sliders for modifying the target joint efforts of the selected articulation.
|
Tutorials & Examples#
Examples
Articulation Inspector: Isaac Utils > Workflows > Articulation Inspector
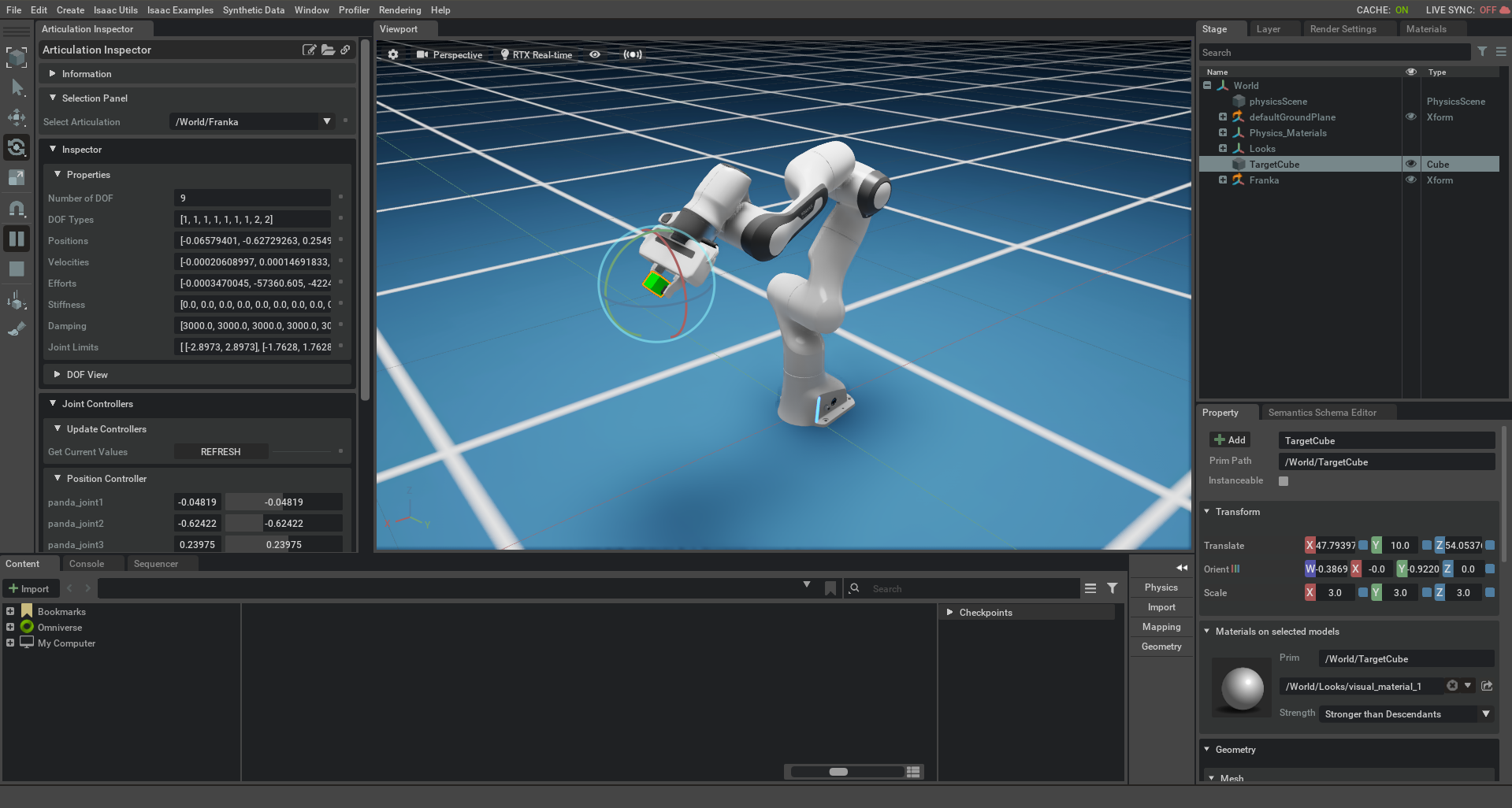
Articulation Inspector Example#
To run this Utility:
Open the Articulation Inspector Extension by going to the top menu bar and clicking Isaac Utils > Articulation Inspector.
Add a Robot from the Isaac library by going to the top menu bar and clicking Create > Isaac > Robots > From library > Manipulators > Franka.
Press the PLAY button to begin simulating.
Select /World/Franka from the Articulation dropdown to populate the Extension’s interface.