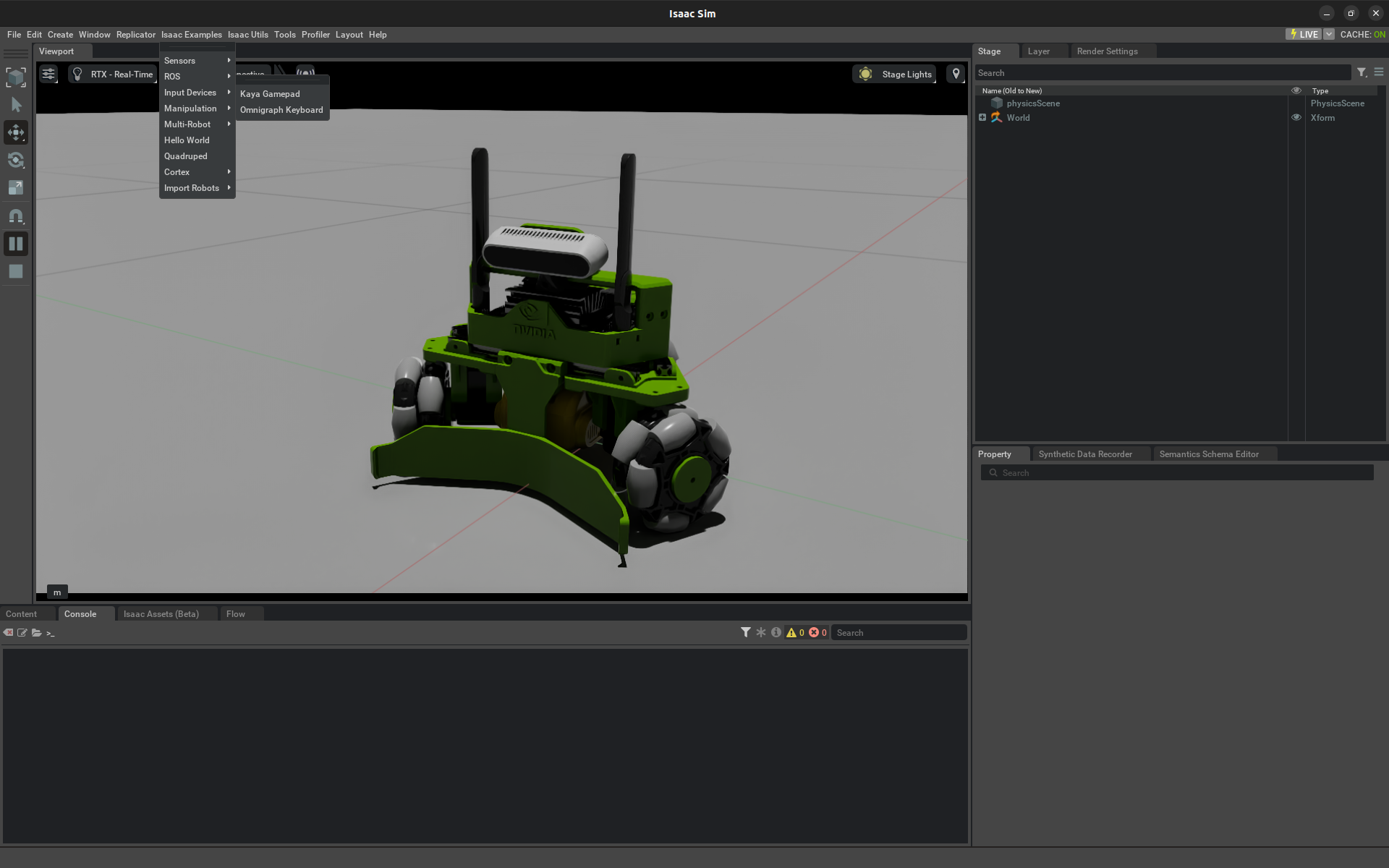
Isaac Examples Menu#
The Examples menu holds a collection of samples that showcase the capabilities of Omniverse Isaac Sim.
Menu Items |
Action |
|---|---|
Sensors |
Examples showing different ways of sensing the environment.
|
|
See LIDAR Example docs for more details.
|
|
See Ultrasonic Example docs for more details.
|
|
See Generic Range Sensor Example docs for more details.
|
|
See IMU Sensor docs for more details.
|
|
See Contact Sensor docs for more details.
|
ROS |
Examples showing ROS/ROS2 integration
|
|
See ROS Navigation docs for more details.
|
|
See April Tags docs for more details.
|
|
See Teleport Service docs for more details.
|
|
See Multiple Robot ROS Navigation for more details.
|
|
See MoveIt Motion Planning Framework for more details.
|
|
See Cameras docs for more details.
|
Input Devices |
Examples using different HIDs.
|
|
See Gamepad Inputs docs for more details.
|
|
See Keyboard Inputs docs for more details.
|
Manipulation |
Examples showing different manipulation tools in Isaac Sim.
|
|
See the Adding a Manipulator Robot for example usage.
|
|
An extension version of the standalone example in Lula RRT.
|
|
See the Adding a Manipulator Robot for example usage.
|
|
See the Adding a Manipulator Robot for example usage.
|
|
Example of saving and replaying joint trajectories.
|
|
See the Surface Gripper Extension docs for more details.
|
Multi-Robot |
Examples showing heterogeneous robot scenes.
|
|
See the Multiple Tasks for example usage.
|
|
See the Adding Multiple Robots for example usage.
|
Hello World |
Base Sample that can be used as template extension.
|
Quadruped |
See the Quadruped Extension for more details.
|
Cortex |
Examples of Cortex
|
|
See the Randomization in Simulation – UR10 Palletizing docs for more details.
|
|
See the Walkthrough: Franka Block Stacking docs for more details.
|
Import Robots |
Examples showing different ways of importing robots and assemblies.
|
|
See the URDF Importer docs for more details.
|
|
See the URDF Importer docs for more details.
|
|
See the URDF Importer docs for more details.
|
|
See the URDF Importer docs for more details.
|