Robot Assets#
Omniverse Isaac Sim supports a wide range of robots with differential bases, form factors, and functions.
These robots can be categorized as wheeled robots, holonomic robots, quadruped robots, robotic manipulator and aerial robots (drones). They can be found in omniverse://localhost/NVIDIA/Assets/Isaac/4.2,
which is referred to as [Isaac Sim Assets Path] below.
Limo
Omniverse Isaac Sim supports the AgileX Limo robot with differential drive base with ROS integration.
Asset Path: [Isaac Sim Assets Path]/Isaac/Robots/AgilexRobotics/limo/limo.usd
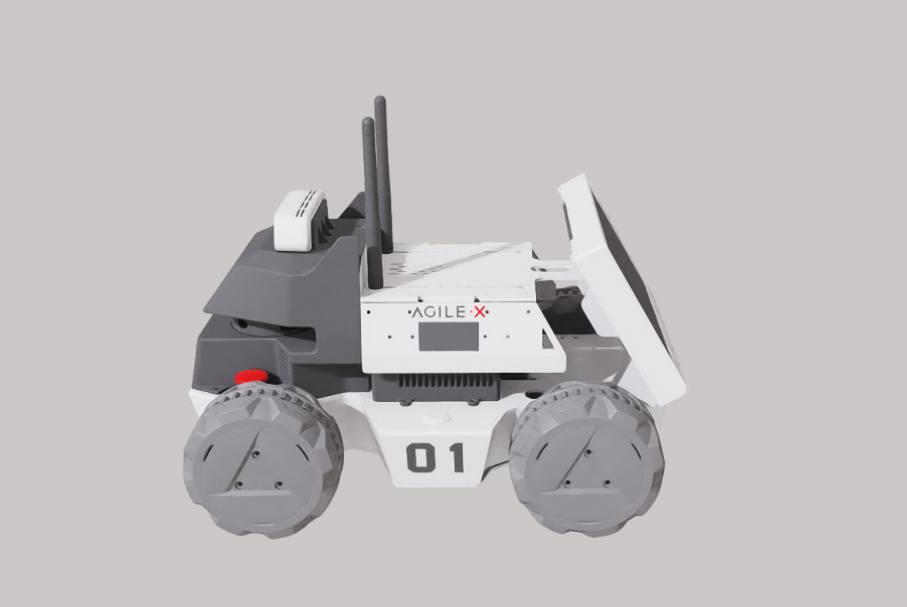
limo.usd#
Limo.
To create the robot: Create>Isaac>Robots>Wheeled Robots>AgilexRobotics>Limo
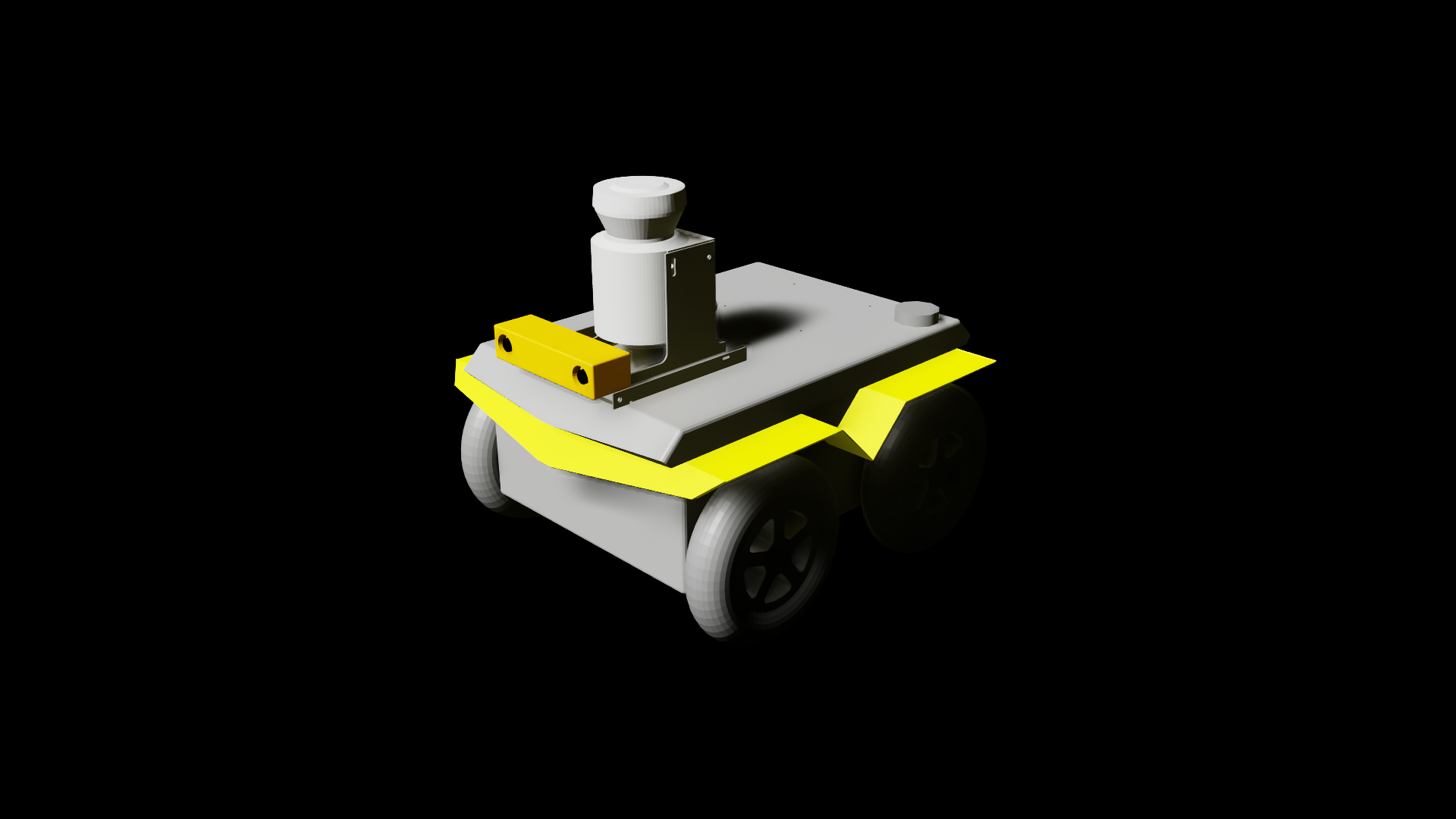
Carter
The NVIDIA Carter robot provides a differential base for navigation-related applications. Nova Carter is the next generation Carter robot, based on the Nova Orin compute and sensor platform.
Assets Path: [Isaac Sim Assets Path]/Isaac/Robots/Carter/
Carter v1. To create the robot: Create>Isaac>Robots>Wheeled Robots>NVIDIA>Carter v1 |

Nova Carter. To create the robot: Create>Isaac>Robots>Wheeled Robots>NVIDIA>Nova Carter |
Clearpath
Omniverse Isaac Sim supports Clearpath mobile robots, including the Dingo, Jackal, and Ridgeback.
Assets Path: [Isaac Sim Assets Path]/Isaac/Robots/Clearpath/
Dingo. To create the robot: Create>Isaac>Robots>Wheeled Robots>Clearpath>Dingo |
Jackal. To create the robot: Create>Isaac>Robots>Wheeled Robots>Clearpath>Jackal |
We also provide 2 configurations of the Clearpath Ridgeback model: one with a Emika Franka Panda manipulator, and one with a Universal Robots UR5 manipulator.
Ridgeback Franka. To create the robot: Create>Isaac>Robots>Wheeled Robots>Clearpath>Ridgeback Franka |
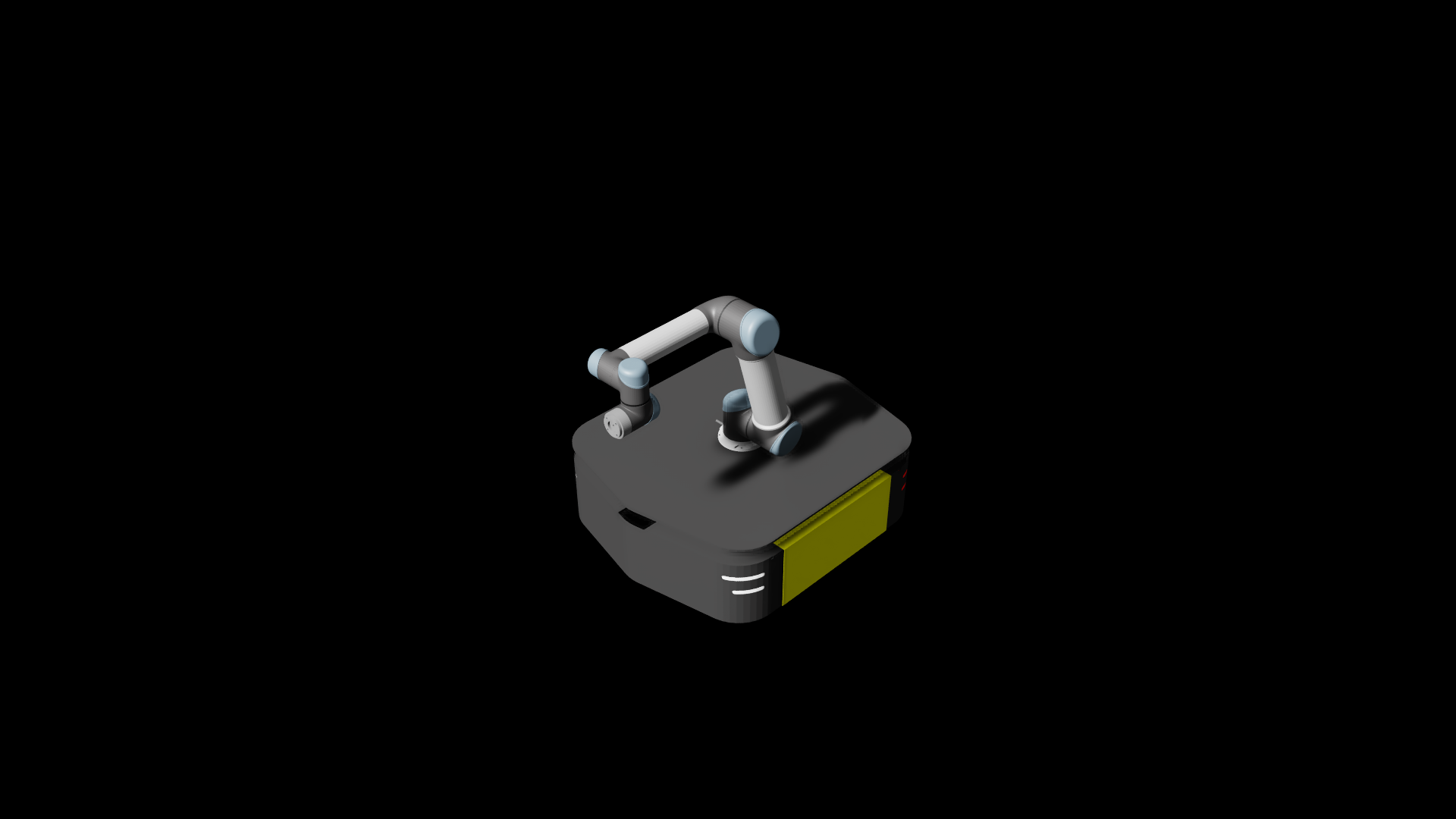
RidgebackUr. To create the robot: Create>Isaac>Robots>Wheeled Robots>Clearpath>RidgebackUr |
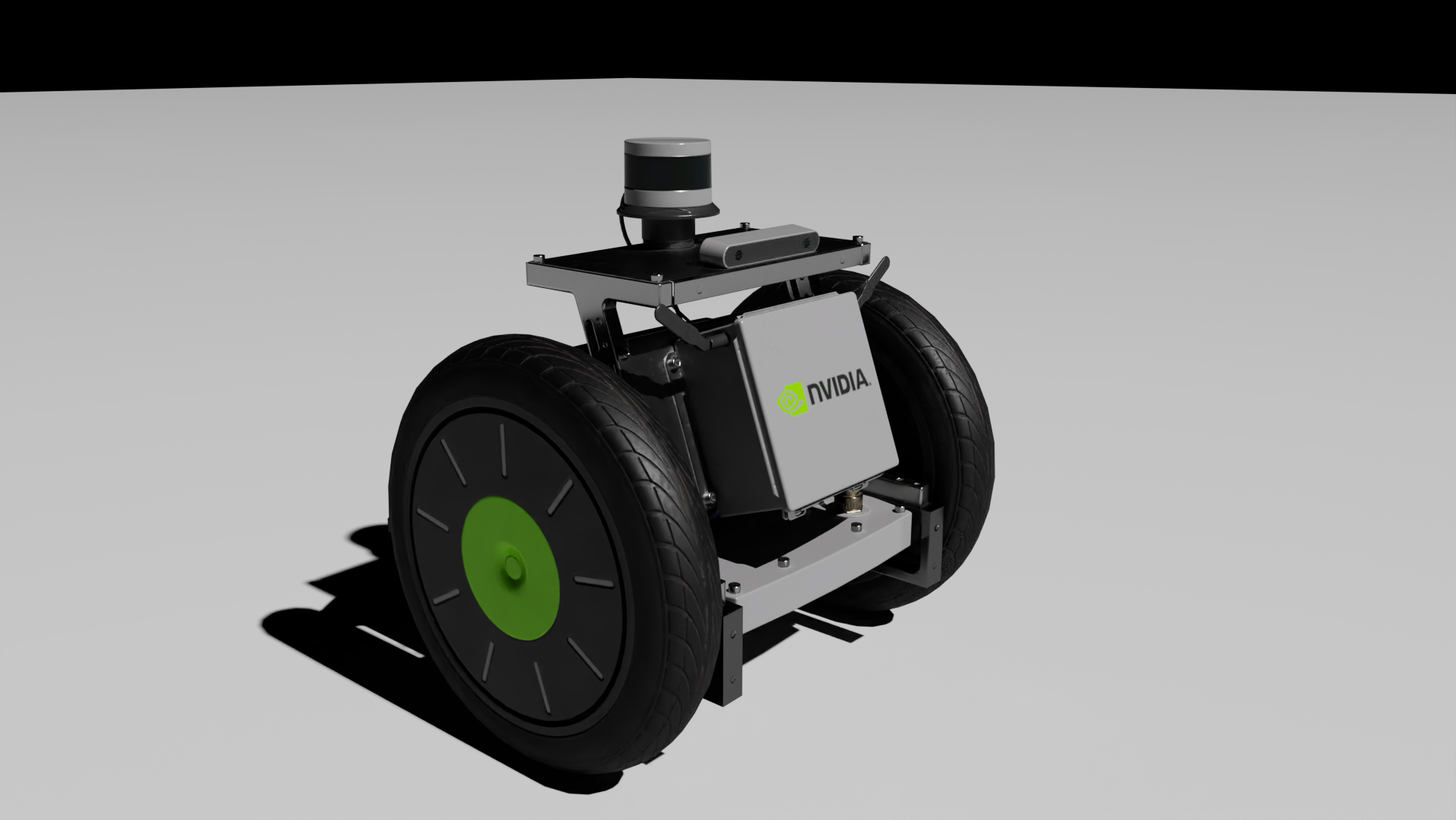
Evobot
The Evobot is a self-balancing robot with a 2-wheel drive, designed to grasp and transport objects. It was developed by Fraunhofer Institute Dortmund.

Assets Path: [Isaac Sim Assets Path]/Isaac/Robots/Evobot/EvoBot.usd#
Evobot.
To create the robot: Create>Isaac>Robots>Wheeled Robots>Fraunhofer>Evobot
Forklift
The forklift model has a single pivot wheel and rollers. It uses a prismatic joint tied to an Articulation Action to control the lift.
Assets Path: [Isaac Sim Assets Path]/Isaac/Robots/Forklift/

Forklift B. To create the robot: Create>Isaac>Robots>Wheeled Robots>Forklift>Forklift B |

Forklift C. To create the robot: Create>Isaac>Robots>Wheeled Robots>Forklift>Forklift C |
JetBot
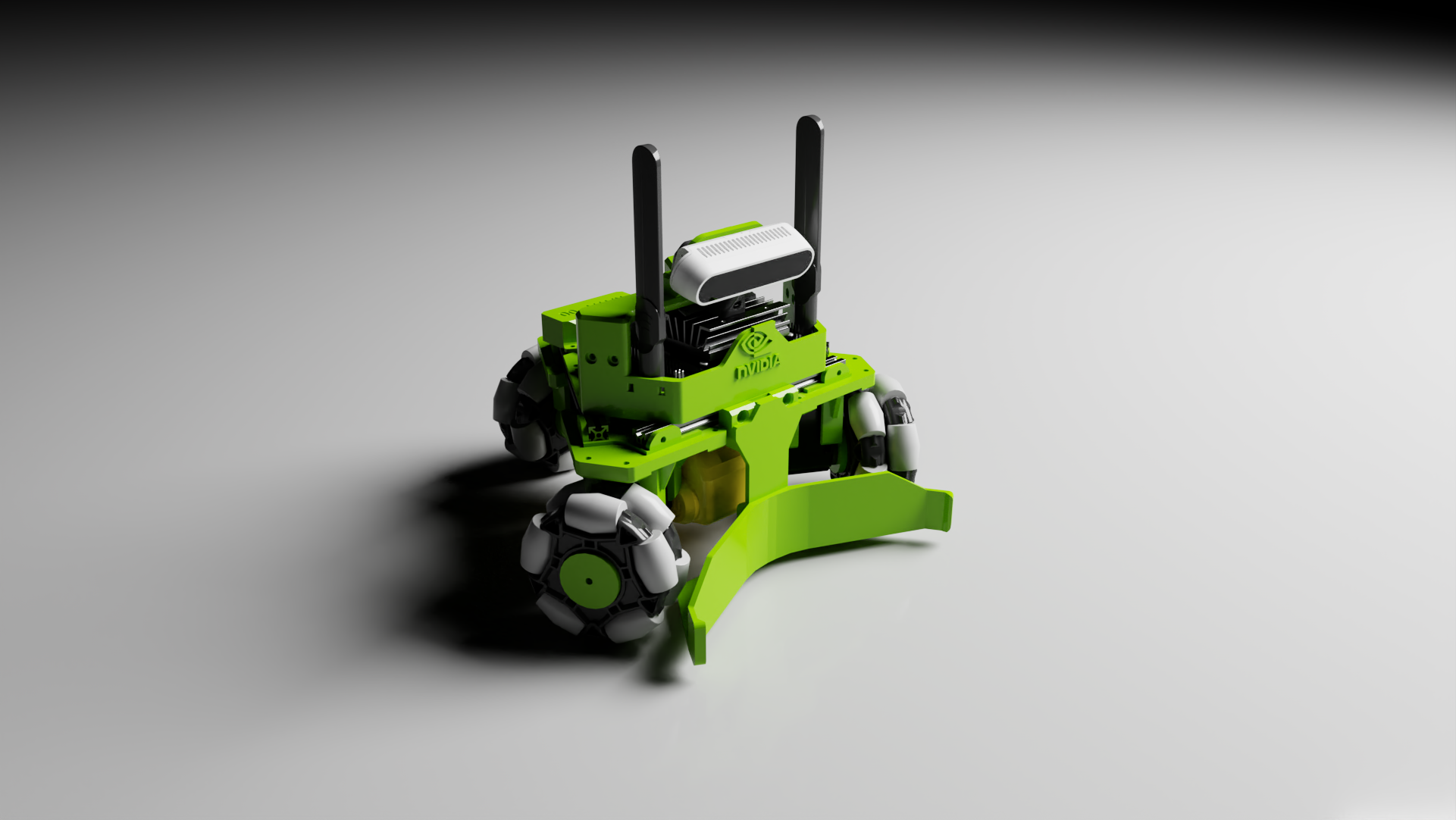
The open-source NVIDIA JetBot AI robot platform gives makers, students, and enthusiasts everything they need to build creative, fun, intelligent AI applications.
Assets Path: [Isaac Sim Assets Path]/Isaac/Robots/Jetbot/

JetBot - simplified model. To create the robot: Create>Isaac>Robots>Wheeled Robots>NVIDIA>Jetbot (simplified) |

JetBot - high-resolution model imported from CAD. To create the robot: Create>Isaac>Robots>Wheeled Robots>NVIDIA>Jetbot |
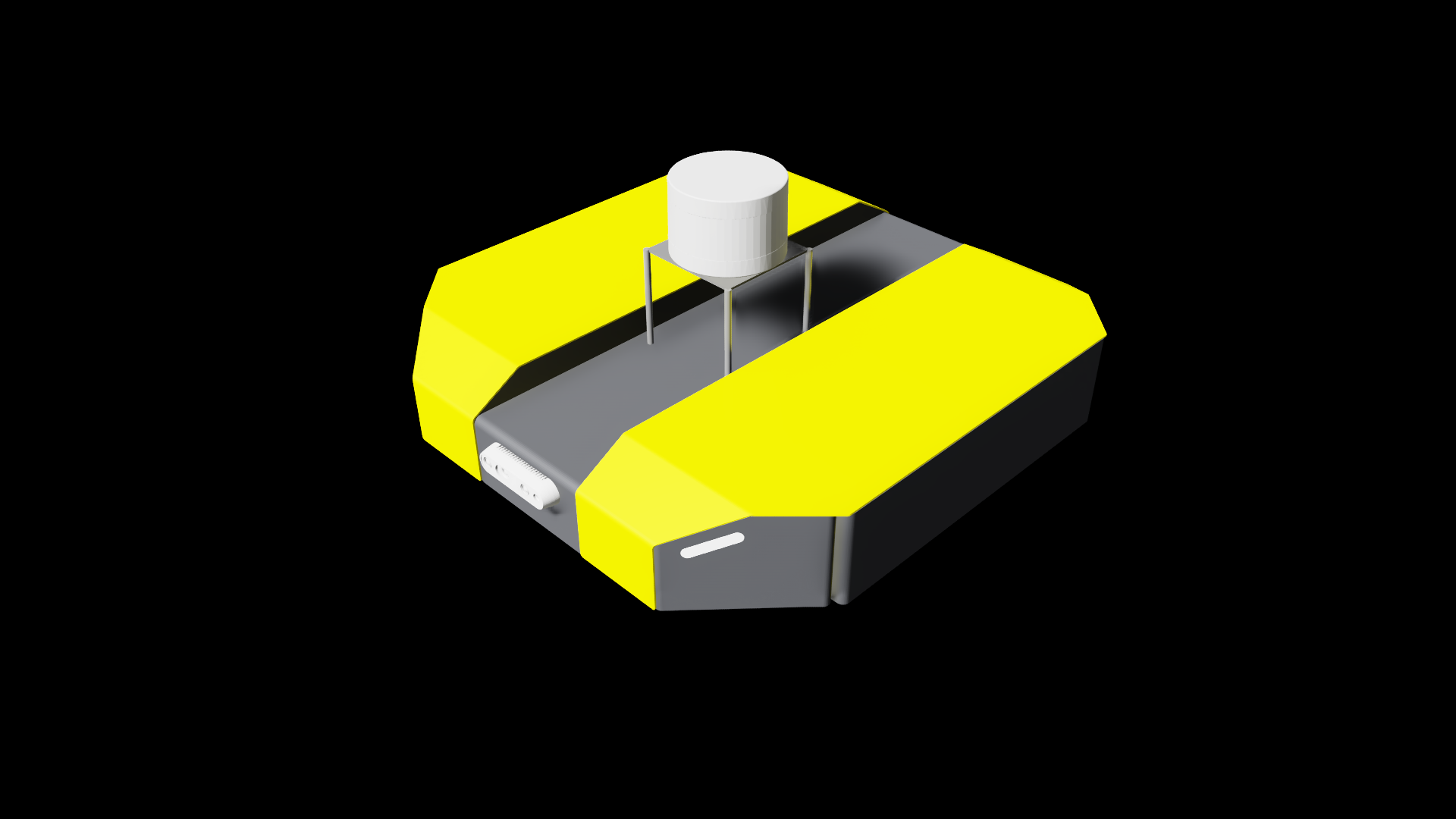
Idealworks iw.hub
Idealworks iw.hub is an mobile base equipped with LIDARs and cameras to enable autonomous navigation, powered by NVIDIA AGX GPU. Capable of carrying payloads of 1,000kg, iw.hub can drive at up to 2.2m/s speeds.

Assets Path: Idealworks iw.hub. |
iw_hub.usd- Base Version. Has mobile base physics rigged. To create the robot: Create>Isaac>Robots>Wheeled Robots>Idealworks>Idealworks iw.hubiw_hub_sensors.usd- Base Version plus sensors API (Lidar, First and third person navigation camera). To create the robot: Create>Isaac>Robots>Wheeled Robots>Idealworks>Idealworks iw.hub (with sensors)iw_hub_static.usd- Static model with no physics rigged. To create the robot: Create>Isaac>Robots>Wheeled Robots>Idealworks>Idealworks iw.hub (static)
iRobot Create 3
The Create3 robot by iRobot is an advanced differential robot designed for a variety of educational applications. It features a circular base with integrated sensors and advanced control capabilities, making it well-suited for indoor navigation, mapping, and similar tasks. The Create3 robot in Omniverse Isaac Sim is equipped with a differential drive system and sensors for realistic simulation.
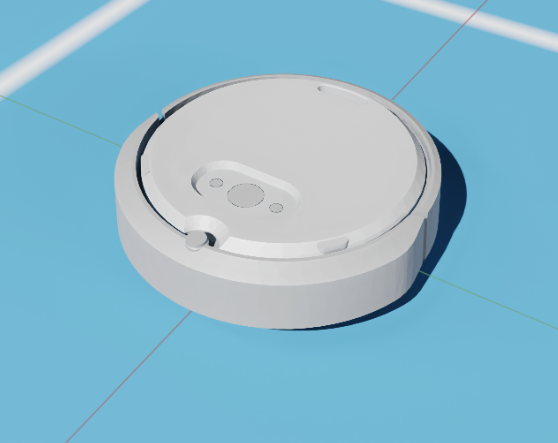
Assets Path: iRobot Create 3. To create the robot: Create>Isaac>Robots>Wheeled Robots>iRobot>Create3 |
create_3.usd- Base Version. Has mobile base physics rigged.
Note
For more details, see iRobot Create 3 documentation.
Leatherback
Leatherback is an NVIDIA research platform for autonomous driving.

Asset Path: Leatherback. To create the robot: Create>Isaac>Robots>Wheeled Robots>NVIDIA>Leatherback |
Differential base robot measurement reference:
Robot |
Wheel Radius (m) |
Wheel Separation (m) |
carter_v1 |
.24 |
.54 |
nova_carter |
.14 |
.413 |
jetbot |
.0325 |
.118 |
iw.hub |
.08 |
.58 |
create_3 |
.03575 |
.233 |
leatherback |
.0995 |
.21 |
Kaya
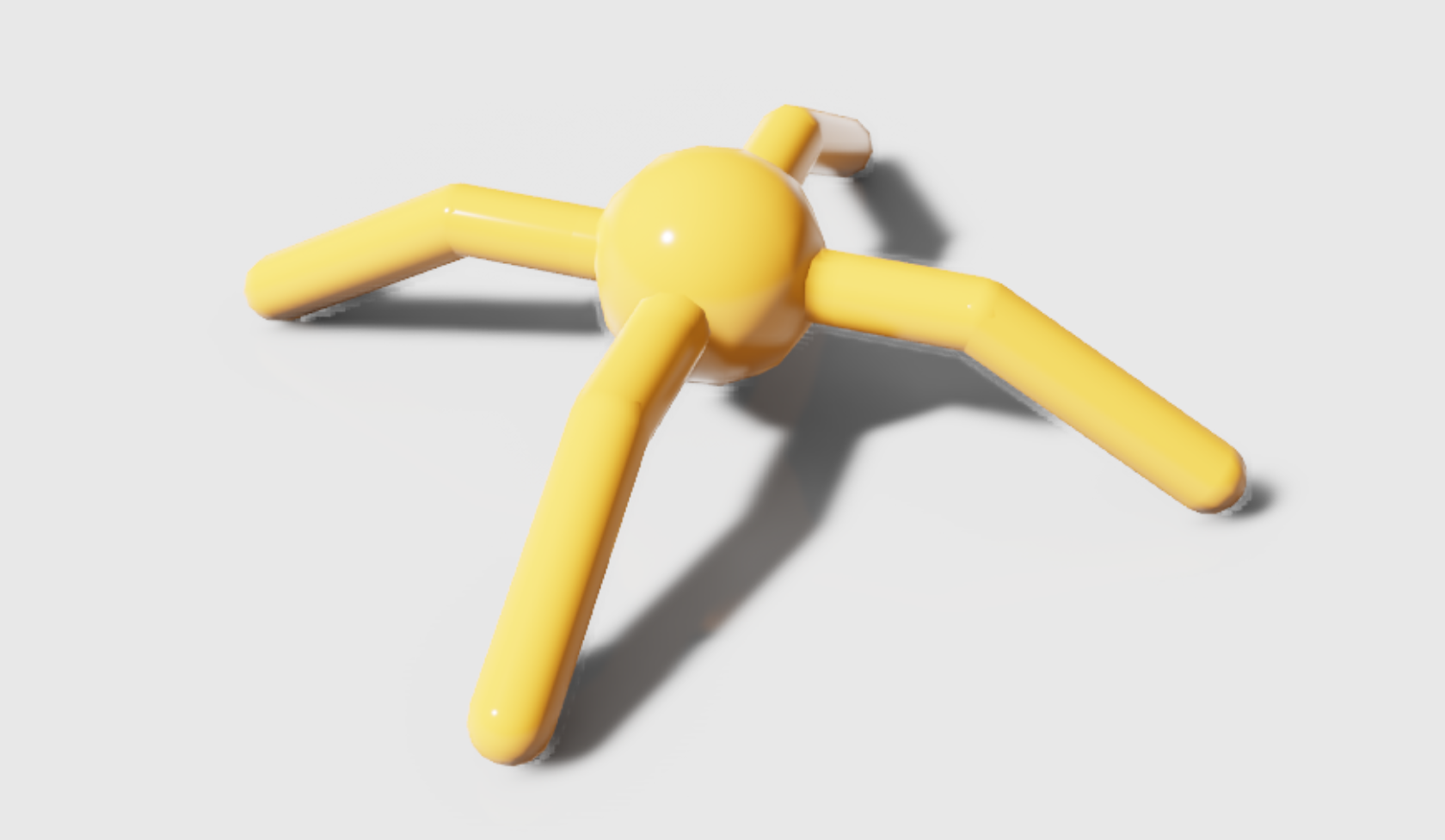
The NVIDIA Kaya robot is a platform to demonstrate the power and flexibility of the Isaac Robot Engine running on the NVIDIA Jetson Nano™ platform. It has been designed with 3D-printed parts and hobbyist components to be as accessible as possible and features a three-wheeled holonomic drive, which allows it to move in any direction.
Asset Path: [Isaac Sim Assets Path]/Isaac/Robots/Kaya/#
NVIDIA Kaya.
kaya.usd- Base Version. To create the robot: Create>Isaac>Robots>Holonomic Robots>NVIDIA>Kayakaya_ogn_gamepad.usd- Base Version plus rigged gamepad control using the holonomic controller. To create the robot: Create>Isaac>Robots>Holonomic Robots>NVIDIA>Kaya (gamepad control)
O3dyn
The O3dyn is an autonomous holonomic transporter developed by Fraunhofer Institute Dortmund. The robot can move in any direction due to its omniwheels, grab pallets using the four levers, and lift the pallet for transport.
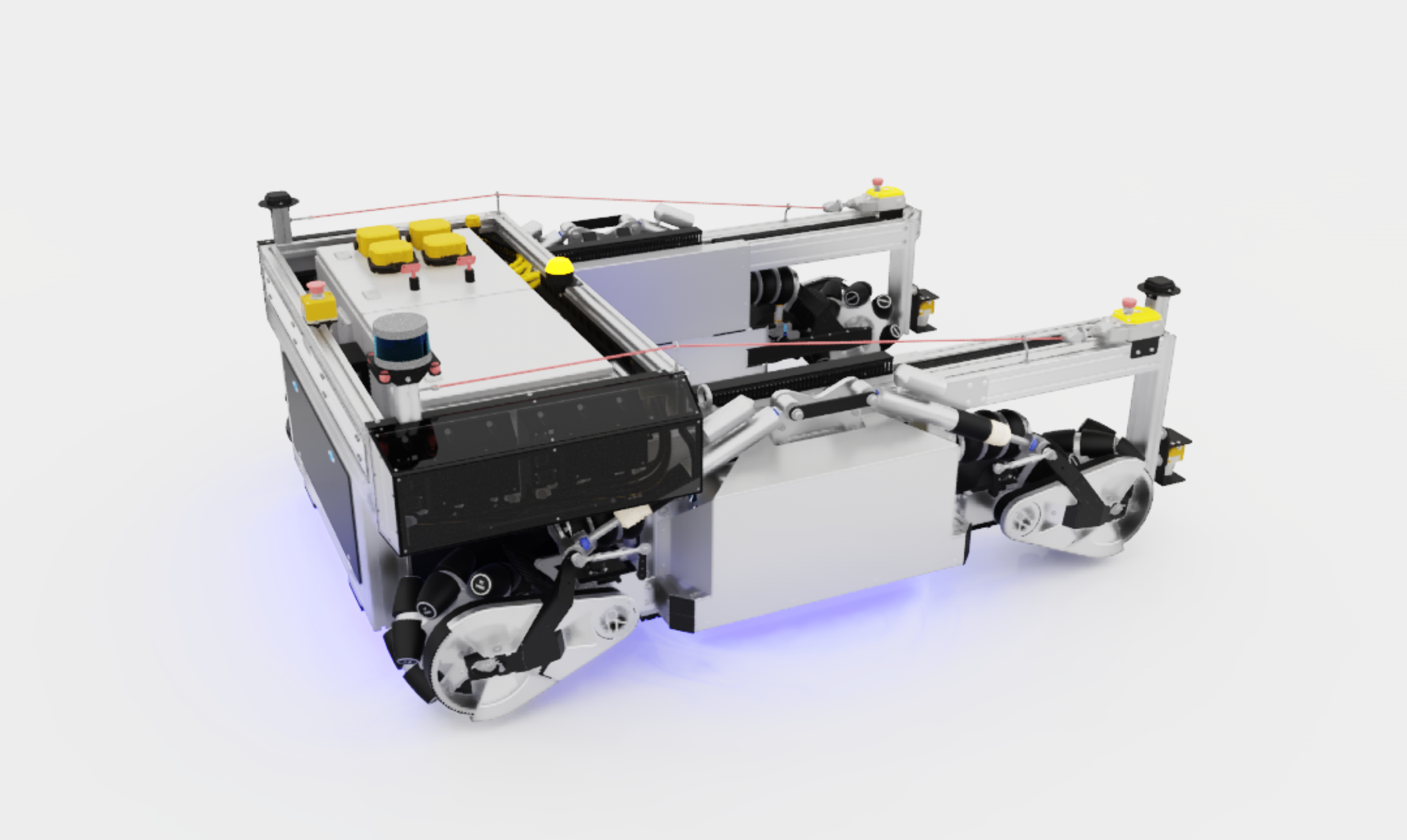
Assets Path: [Isaac Sim Assets Path]/Isaac/Robots/O3dyn/#
Fraunhofer O3dyn.
o3dyn.usd- Base Version. Has mobile base, grippers and lift physics rigged, sensors positioning. To create the robot: Create>Isaac>Robots>Holonomic Robots>Fraunhofer>O3dyno3dyn_controller.usd- Base Version plus rigged gamepad control using the holonomic controller. To create the robot: Create>Isaac>Robots>Holonomic Robots>Fraunhofer>O3dyn (gamepad control)
Note
For more details, see Fraunhofer O3dyn documentation.
Ant
The Ant is a basic four-legged robot with revolute joints on its legs. It is based on the OpenAI Gym Ant.
Asset Path: [Isaac Sim Assets Path]/Isaac/Robots/Ant/#
Ant.
ant.usd- Base version. Not included in Create menu.ant_instanceable.usd- Instanceable version configured to create multiple efficient clones for RL scenarios. To create the robot: Create>Isaac>Robots>Quadruped Robots>Ant
ANYbotics ANYmal
The ANYmal robot is an autonomous quadruped robot developed by ANYbotics.
Assets Path: [Isaac Sim Assets Path]/Isaac/Robots/ANYbotics/anymal_c.usd:#
ANYbotics ANYmal.
To create the robot: Create>Isaac>Robots>Quadruped Robots>ANYbotics ANYmal
Boston Dynamics Spot
Asset Path: [Isaac Sim Assets Path]/Isaac/Robots/BostonDynamics/spot

Spot. To create the robot: Create>Isaac>Robots>Quadruped Robots>Boston Dynamics>Spot |

Spot (with arm). To create the robot: Create>Isaac>Robots>Quadruped Robots>Boston Dynamics>Spot (with arm) |
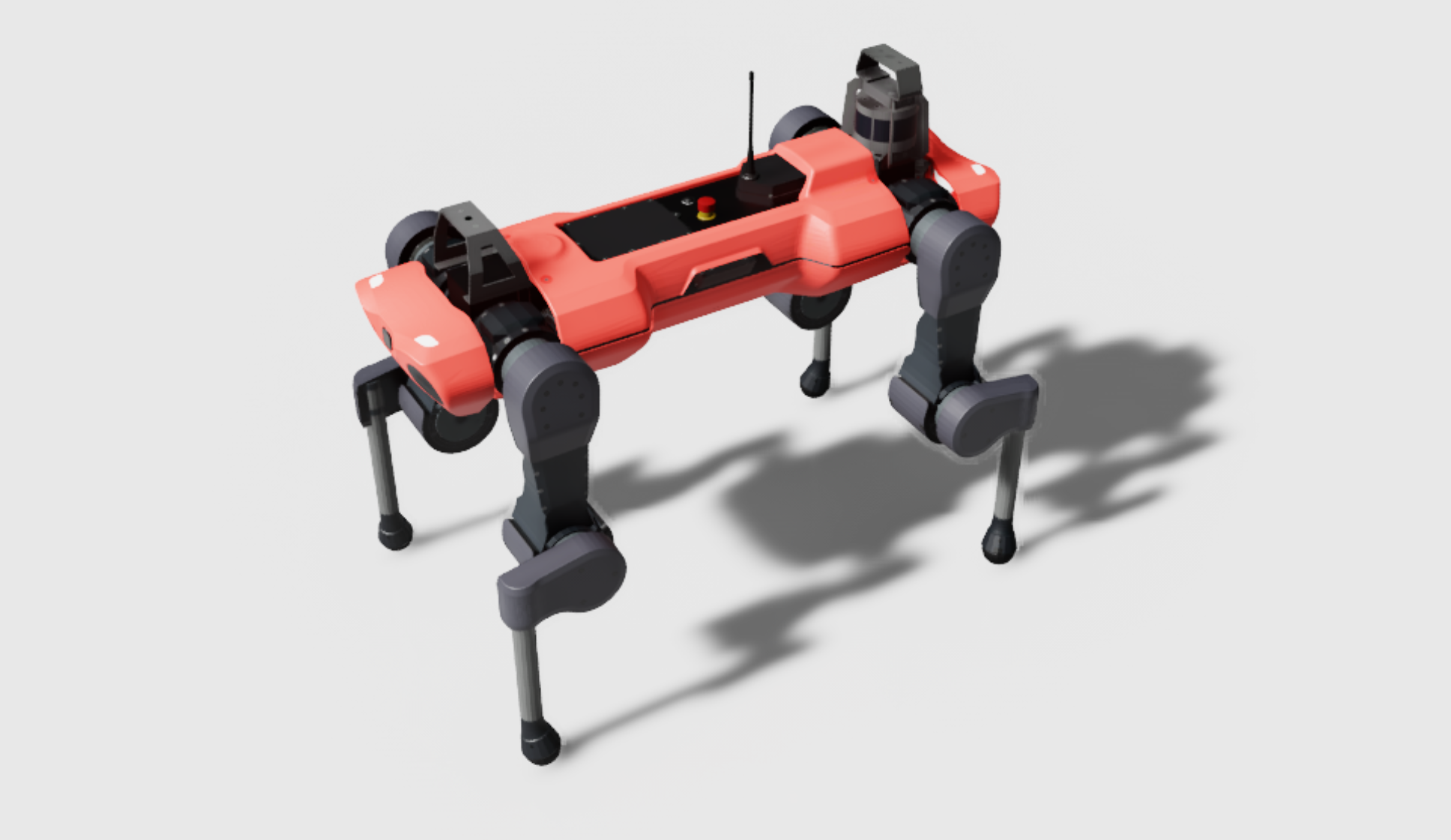
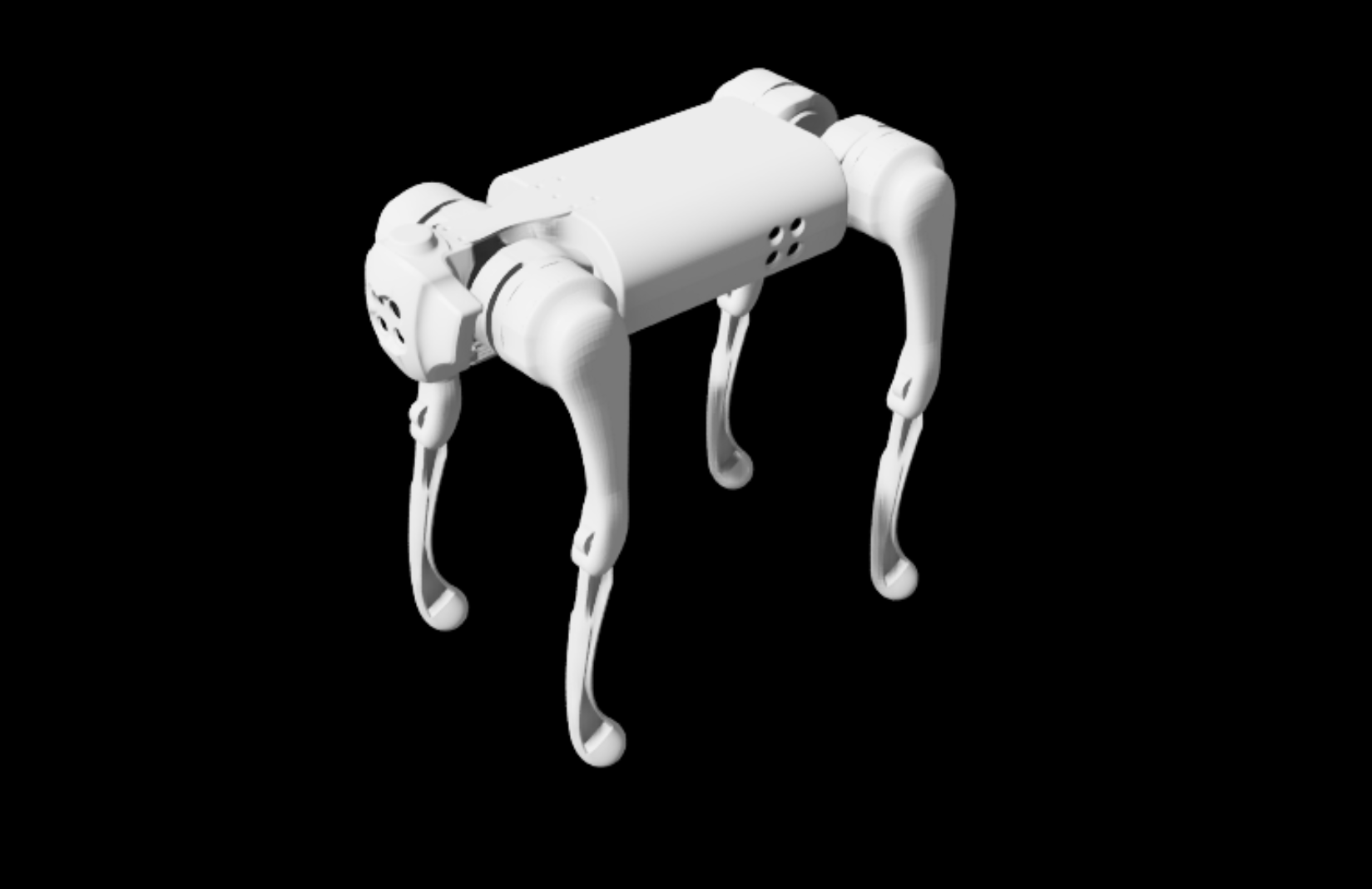
Unitree Quadruped Robots
The A1, B2, Go1, and Go2 are quadruped robots developed by Unitree robotics, simulated in Isaac Sim. A1 quadruped is used in the quadruped example.
Assets Path: [Isaac Sim Assets Path]/Isaac/Robots/Unitree/

Unitree A1. To create the robot: Create>Isaac>Robots>Quadruped Robots>Unitree>A1 |

Unitree B2. To create the robot: Create>Isaac>Robots>Quadruped Robots>Unitree>B2 |
Unitree Go1. To create the robot: Create>Isaac>Robots>Quadruped Robots>Unitree>Go1 |

Unitree Go2. To create the robot: Create>Isaac>Robots>Quadruped Robots>Unitree>Go2 |
Note
To see examples controlling quadruped robots: Quadruped Extension
Denso Cobotta
The following Denso models models are included: Cobotta Pro 900, Cobotta Pro 1300.
Assets Path: [Isaac Sim Assets Path]/Isaac/Robots/Denso/
Cobotta Pro 900. To create the robot: Create>Isaac>Robots>Manipulator Robots>Denso>Cobotta Pro 900 |
Cobotta Pro 1300. To create the robot: Create>Isaac>Robots>Manipulator Robots>Denso>Cobotta Pro 1300 |
Fanuc
The Fanuc CRX10iA/L is a 6-axis robot with a 10kg payload.
Asset Path: [Isaac Sim Assets Path]/Isaac/Robots/Fanuc/crx10ial.usd#
Fanuc CRX10iA/L.
To create the robot: Create>Isaac>Robots>Manipulator Robots>Fanuc CRX10IAL
Festo
The Festo Cobot is a 6-axis pneumatic manipulator.

Asset Path: [Isaac Sim Assets Path]/Isaac/Robots/Festo/festo_cobot.usd#
Festo Cobot.
To create the robot: Create>Isaac>Robots>Manipulator Robots>Festo Cobot
Flexiv
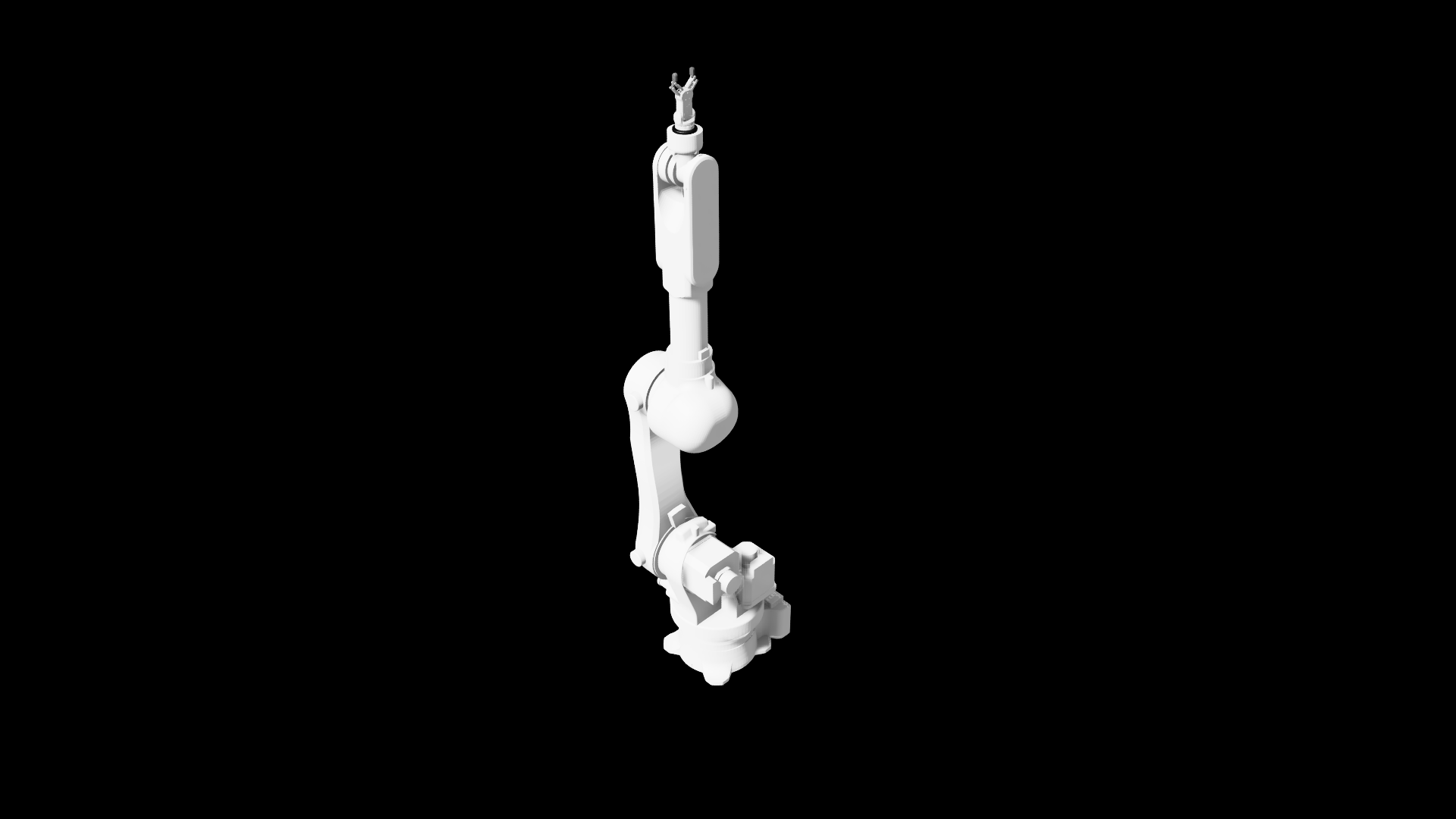
The Flexiv Rizon 4 is a 7-axis adaptive manipulator.
Asset Path: [Isaac Sim Assets Path]/Isaac/Robots/Flexiv/Rizon4/flexiv_rizon4.usd#
Flexiv Rizon 4.
To create the robot: Create>Isaac>Robots>Manipulator Robots>Flexiv Rizon 4
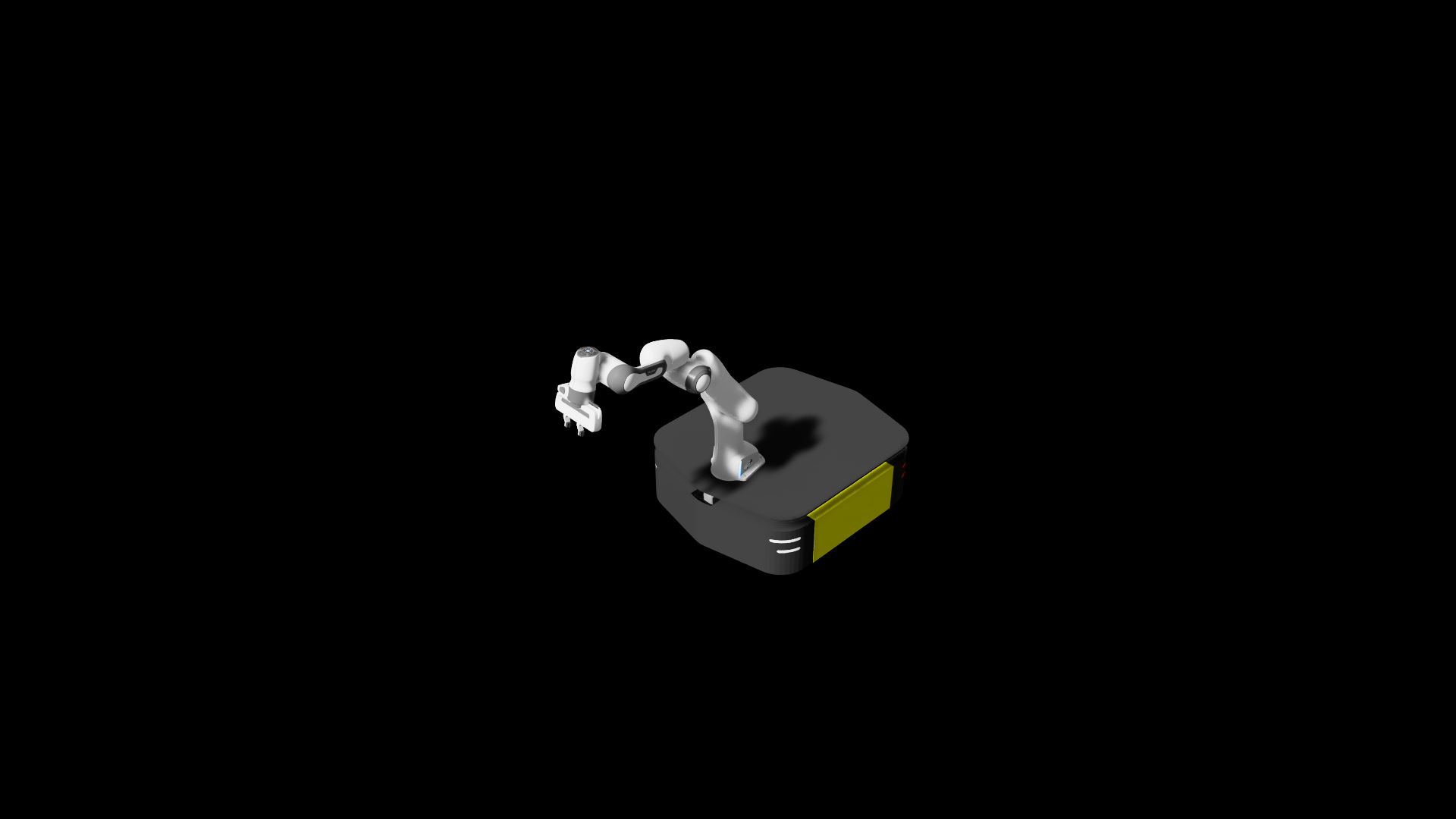
Franka Emika: Panda
The Franka Emika: Panda robot is provided in two configurations, the base/default configuration and the alternate finger gripper configuration used by the Leonardo preview sample application.
Assets Path: [Isaac Sim Assets Path]/Isaac/Robots/Franka/
Base Franka. To create the robot: Create>Isaac>Robots>Manipulator Robots>Franka>Franka |

Franka With Alternate Fingers. To create the robot: Create>Isaac>Robots>Manipulator Robots>Franka>Franka (alt. fingers) |
Franka FR3. To create the robot: Create>Isaac>Robots>Manipulator Robots>Franka>FR3 |
Kawasaki
Our library has following Kawasaki Robot models: RS007L, RS007N, RS013N, RS025N, RS080N.
Assets Path: [Isaac Sim Assets Path]/Isaac/Robots/Kawasaki/
RS007L Model. To create the robot: Create>Isaac>Robots>Manipulator Robots>Kawasaki>RS007L |
RS007N Model. To create the robot: Create>Isaac>Robots>Manipulator Robots>Kawasaki>RS007N |
RS013N Model. To create the robot: Create>Isaac>Robots>Manipulator Robots>Kawasaki>RS013N |
RS025N Model. To create the robot: Create>Isaac>Robots>Manipulator Robots>Kawasaki>RS025N |
RS080N/rs080n_onrobot_rg2.usd#
RS080N Model.
To create the robot: Create>Isaac>Robots>Manipulator Robots>Kawasaki>RS080N
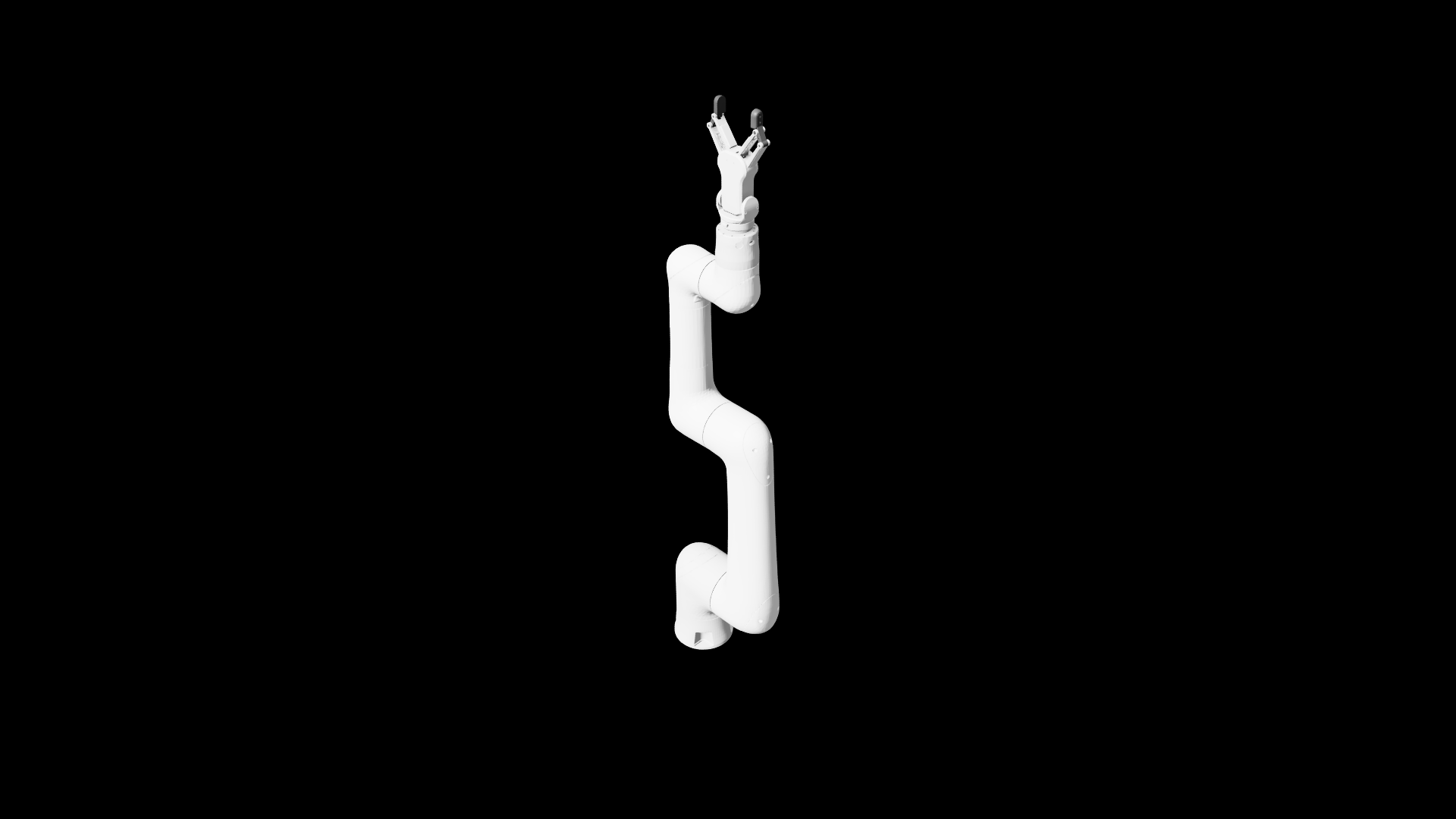
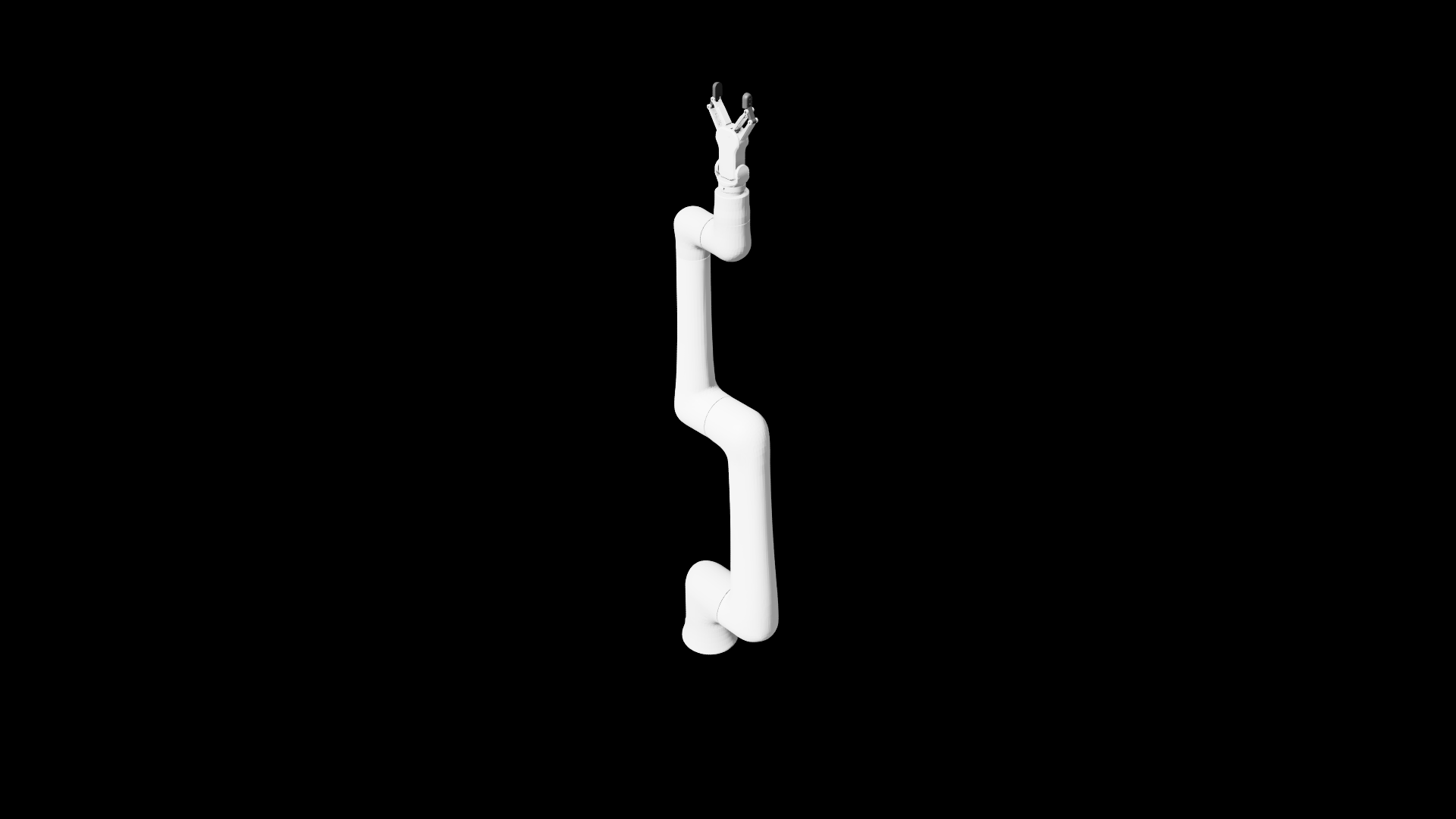
Kinova
Our library has the following Kinova Robot models: Gen 3, Jaco 2 J2N6300, and Jaco 2 J2N7S300.
Assets Path: [Isaac Sim Assets Path]/Isaac/Robots/Kinova/
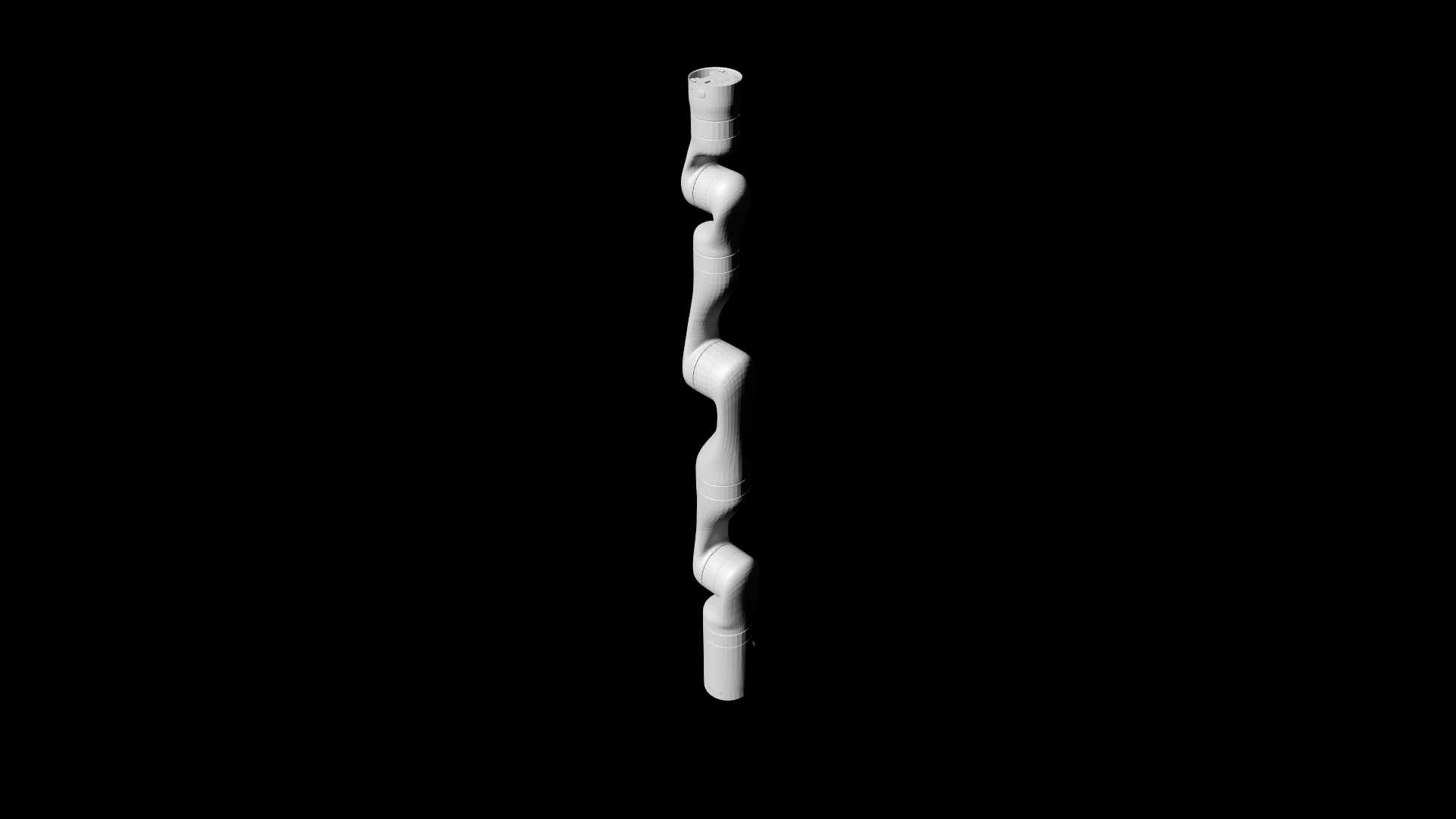
Gen 3 Model. To create the robot: Create>Isaac>Robots>Manipulator Robots>Kinova>Gen 3 |
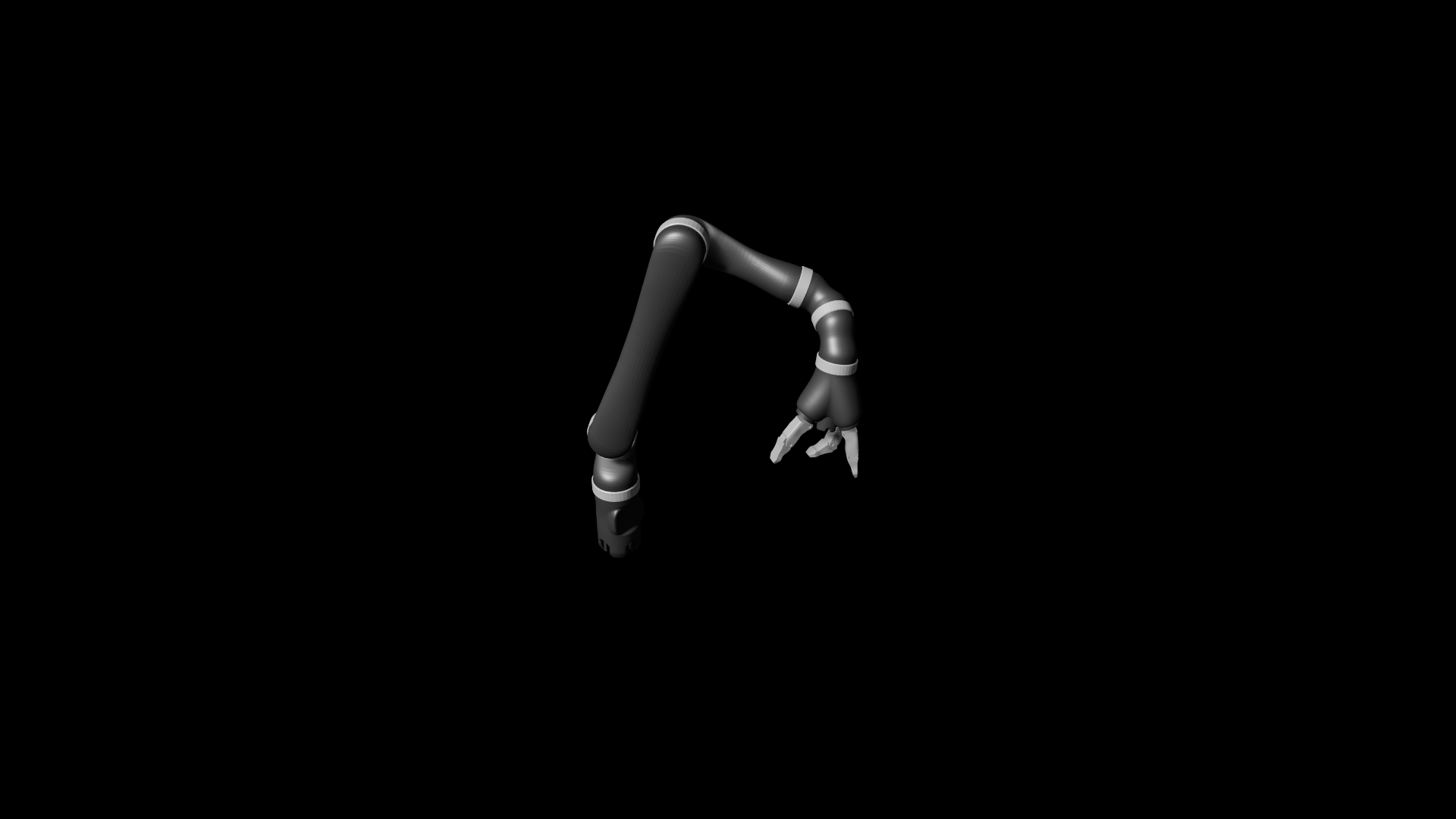
J2N6S300 Model. To create the robot: Create>Isaac>Robots>Manipulator Robots>Kinova>J2N6S300 |
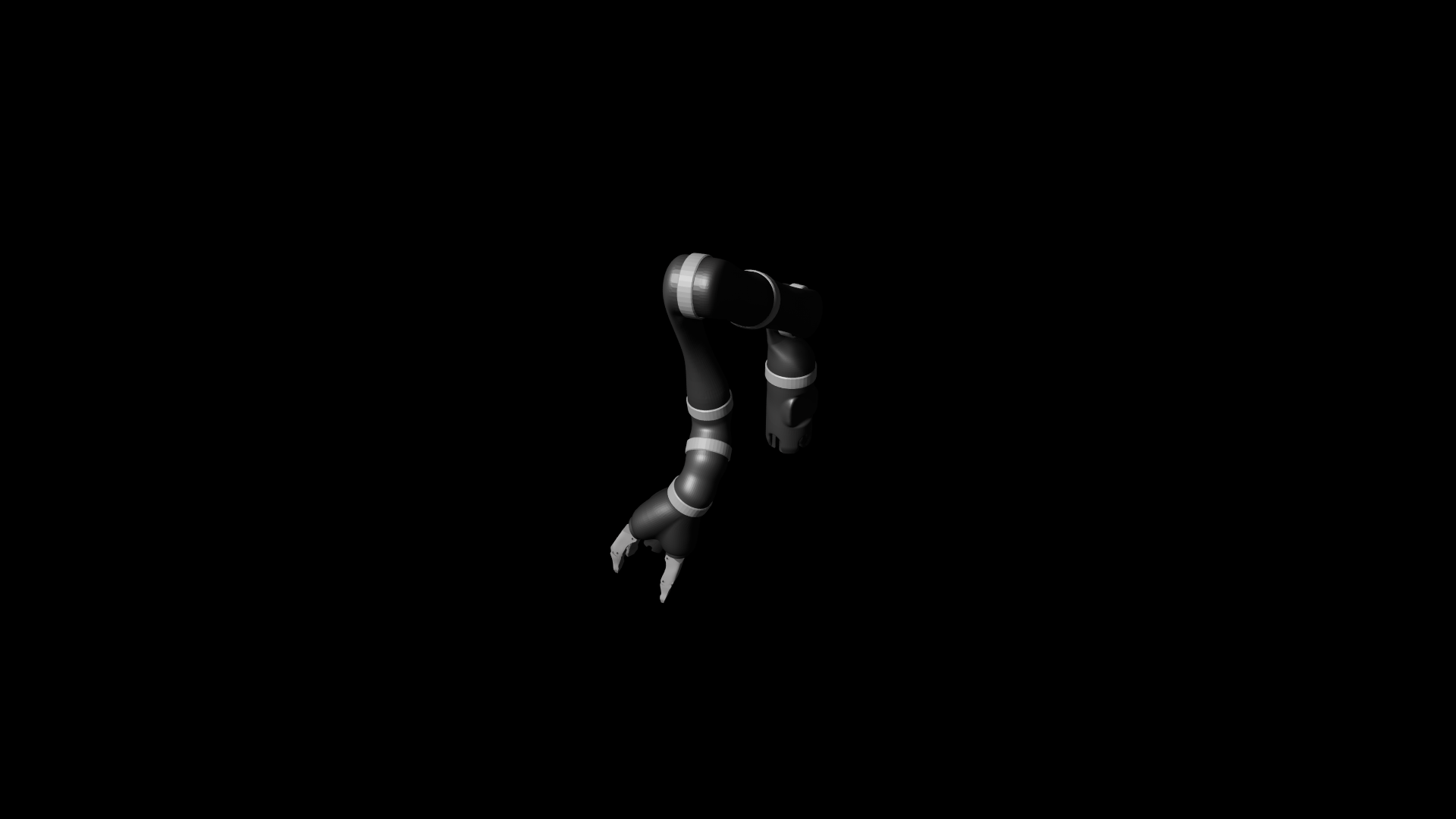
J2N7S300 Model. To create the robot: Create>Isaac>Robots>Manipulator Robots>Kinova>J2N7S300 |
Kuka
Our library has the following Kuka model: KR210 L150.
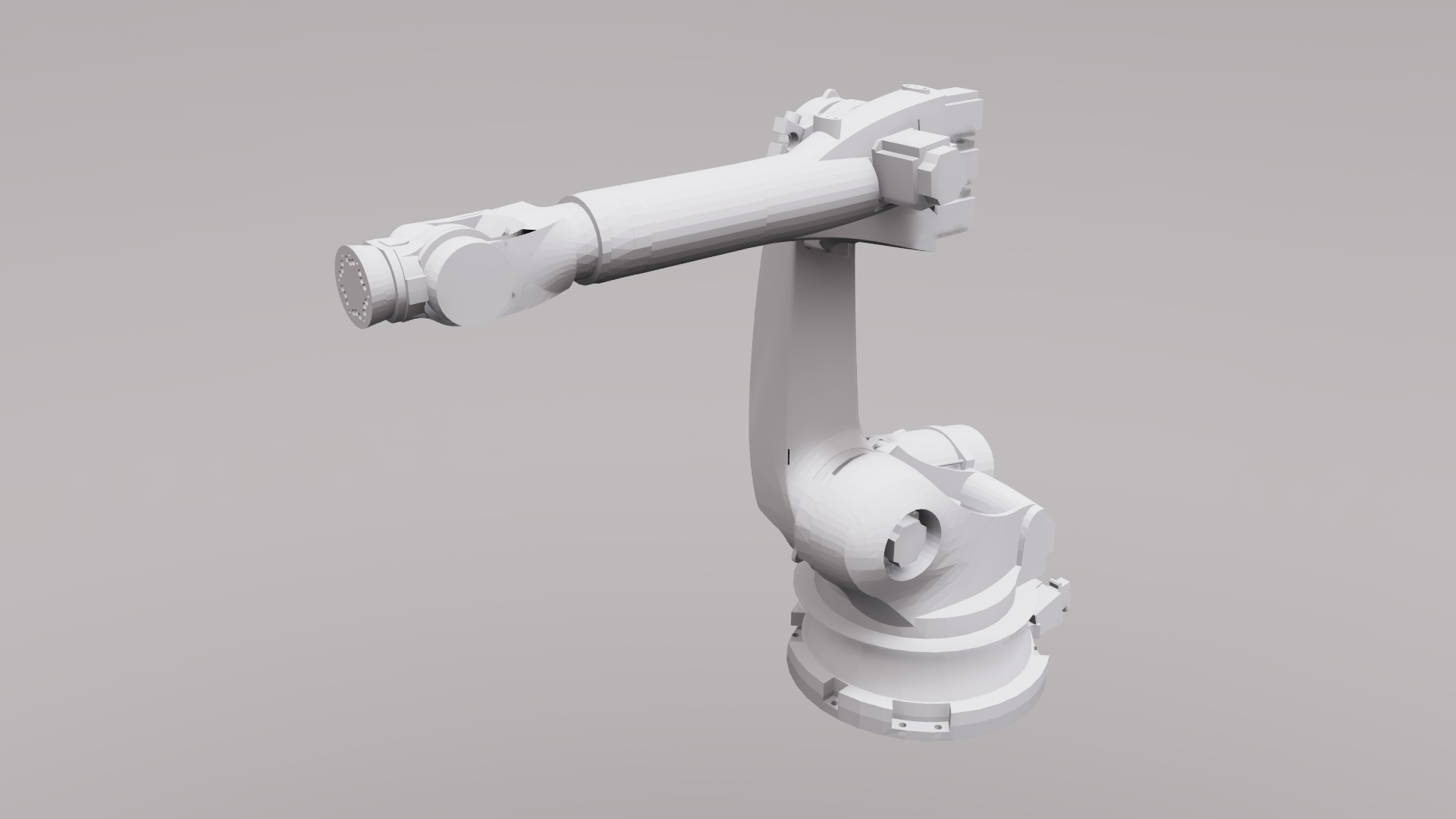
Assets Path: [Isaac Sim Assets Path]/Isaac/Robots/Kuka/KR210_L150/kr210_l150.usd#
KR210 L150.
To create the robot: Create>Isaac>Robots>Manipulator Robots>Kuka KR210 L150
Rethink Robotics
Our library has the following Rethink Robotics model: Sawyer.
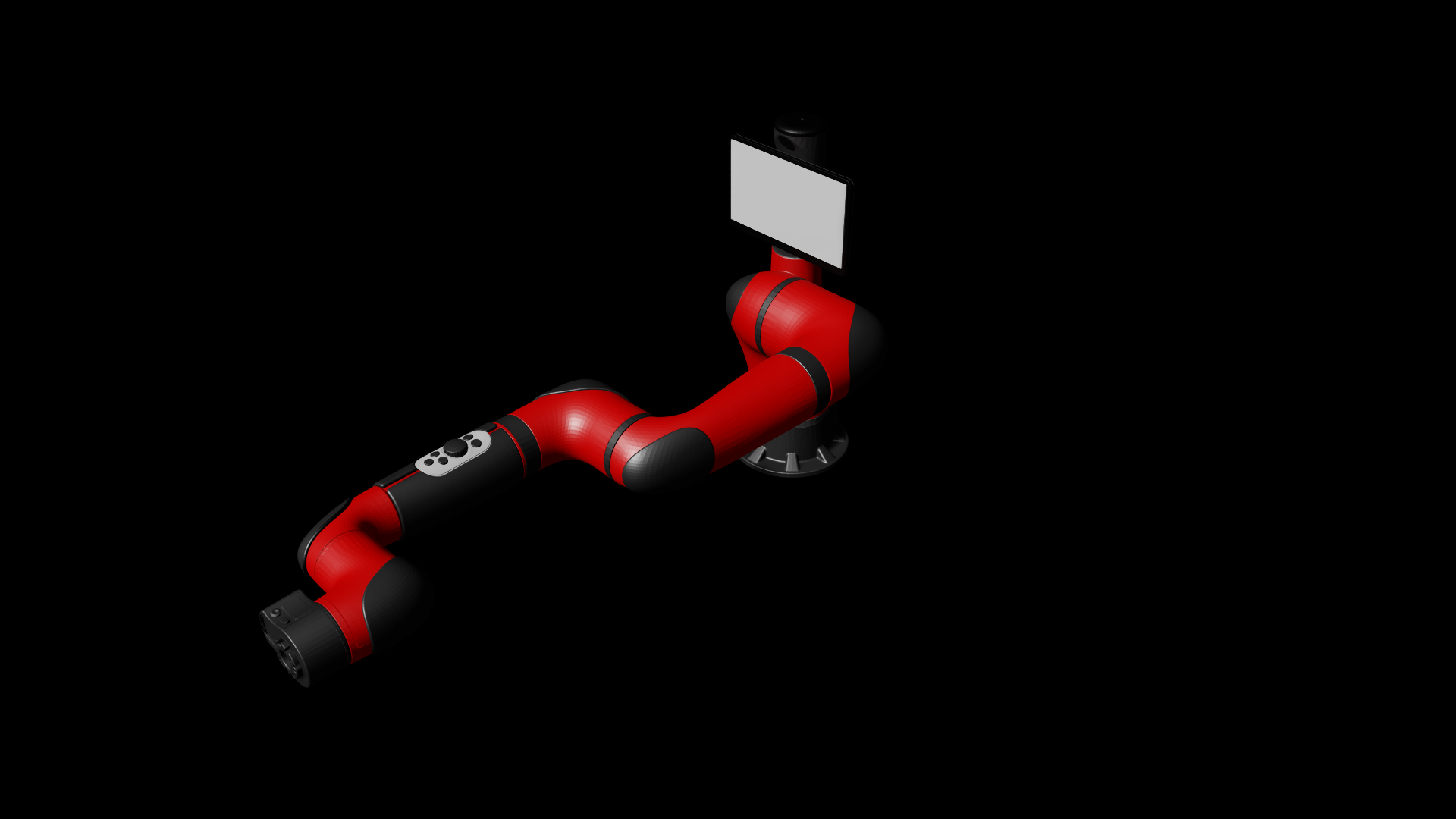
Assets Path: [Isaac Sim Assets Path]/Isaac/Robots/RethinkRobotics/sawyer_instanceable.usd#
To create the robot: Create>Isaac>Robots>Manipulator Robots>Rethink Robotics Sawyer
Robotiq
Our library has the following Robotiq models: 2F-140, 2F-85, and Hand-E.
Assets Path: [Isaac Sim Assets Path]/Isaac/Robots/Robotiq

2F-140 Model. To create the robot: Create>Isaac>End Effectors>Robotiq>2F-140 |

2F-85 Model. To create the robot: Create>Isaac>End Effectors>Robotiq>2F-85 |

Hand-E Model. To create the robot: Create>Isaac>End Effectors>Robotiq>Hand-E |
Techman
Our library has the following Techman Robot model: TM12.
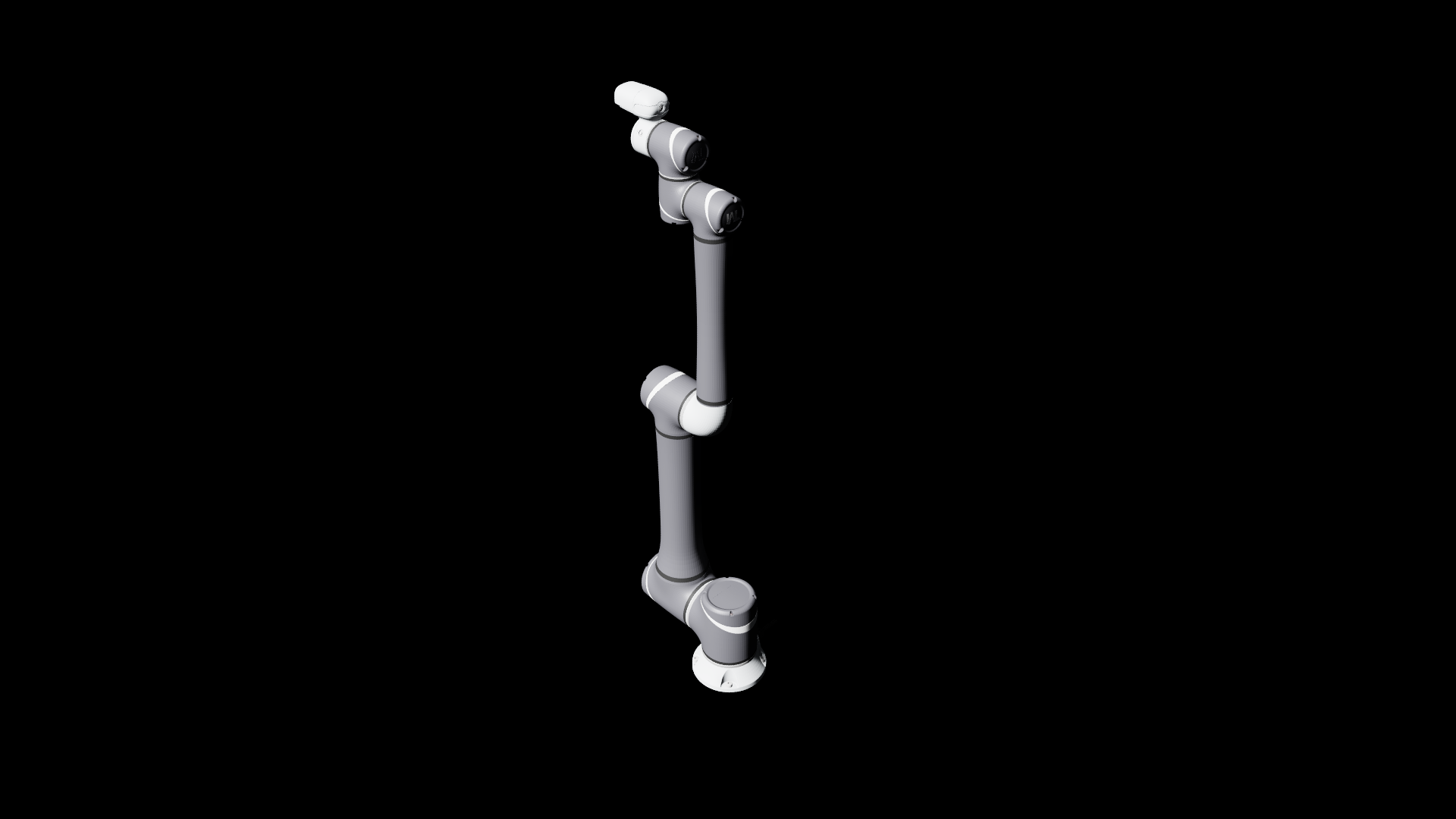
Assets Path: [Isaac Sim Assets Path]/Isaac/Robots/Techman/TM12/tm12.usd#
TM12.
To create the robot: Create>Isaac>Robots>Manipulator Robots>Techman TM12
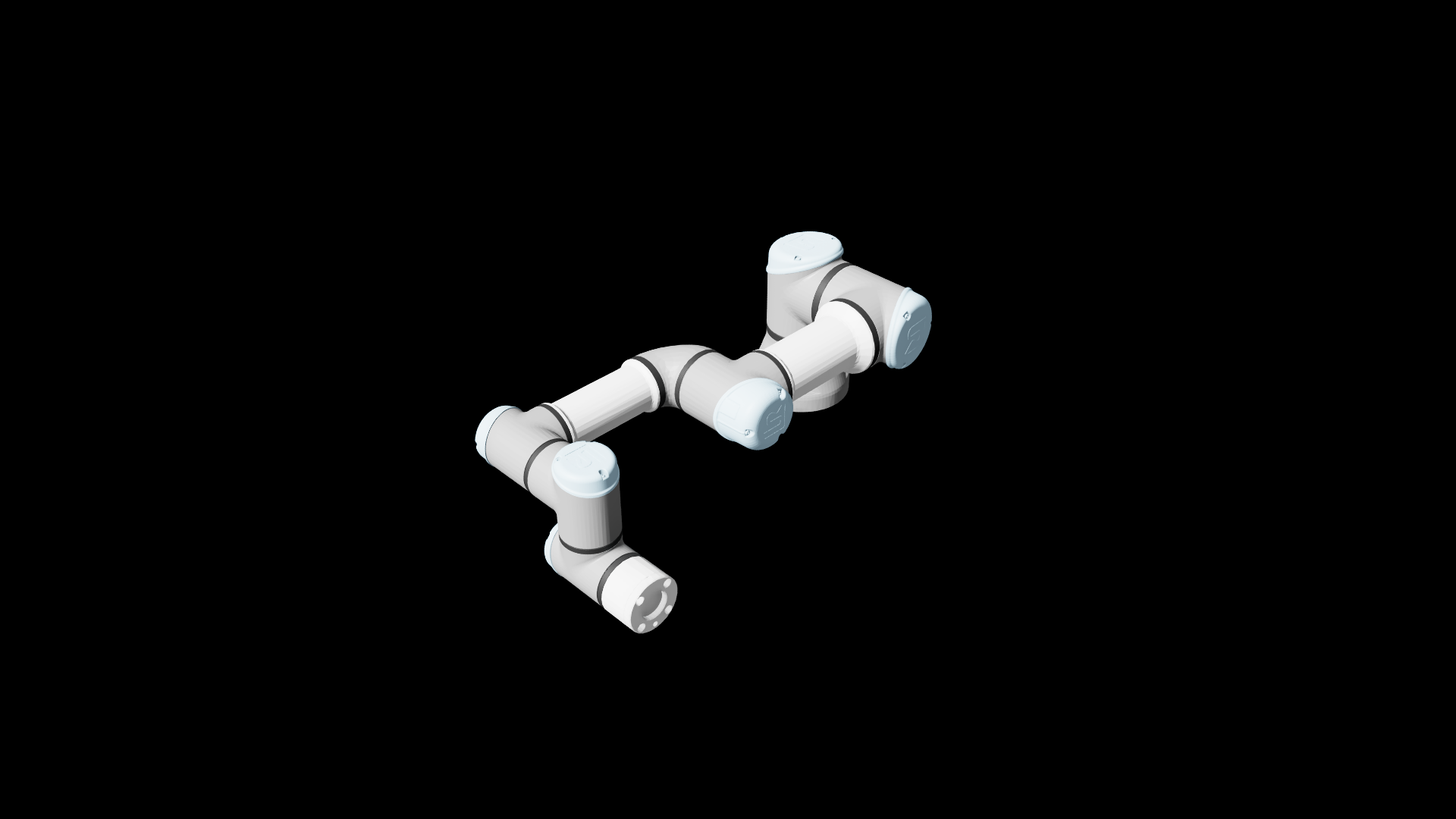
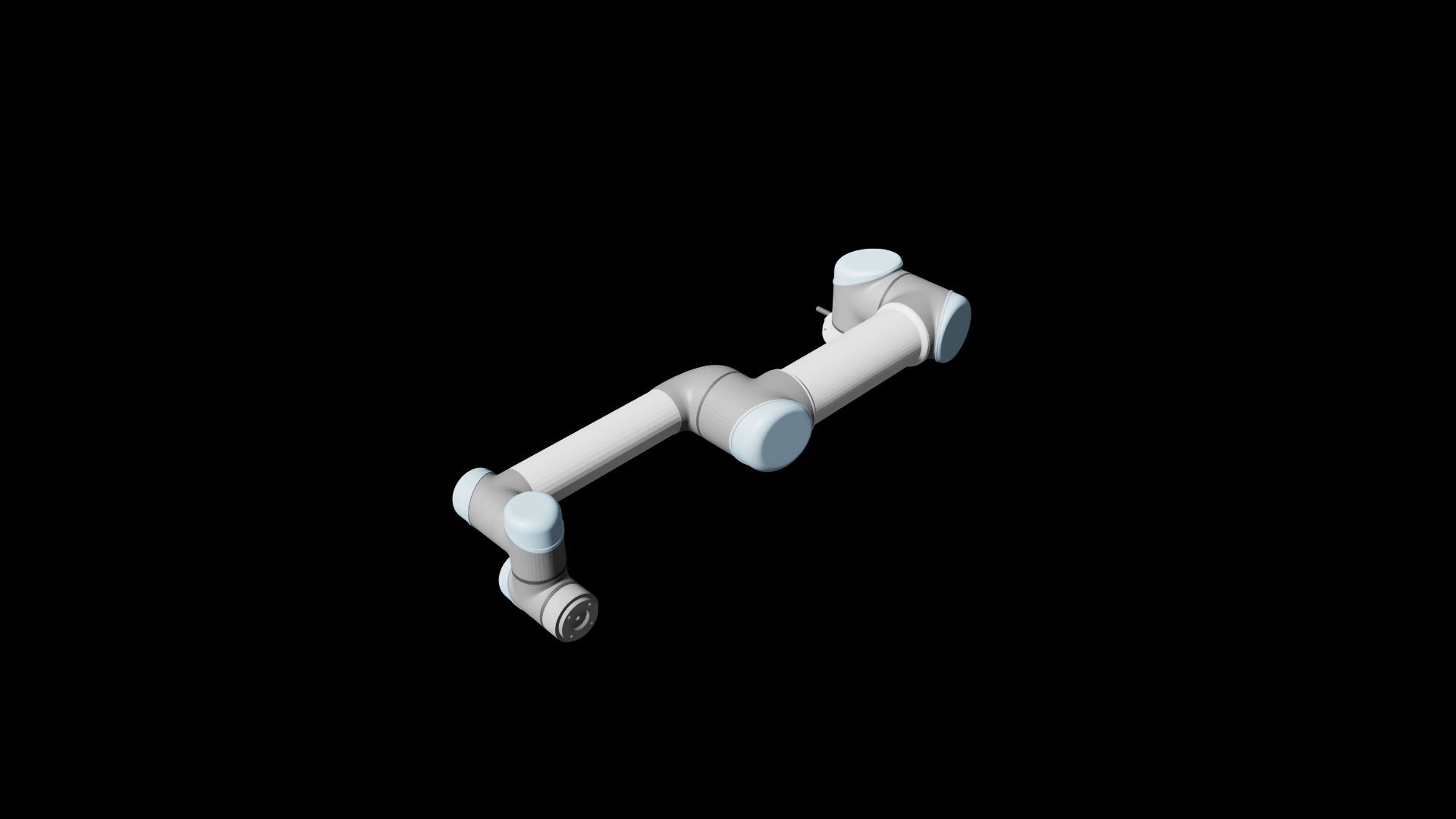
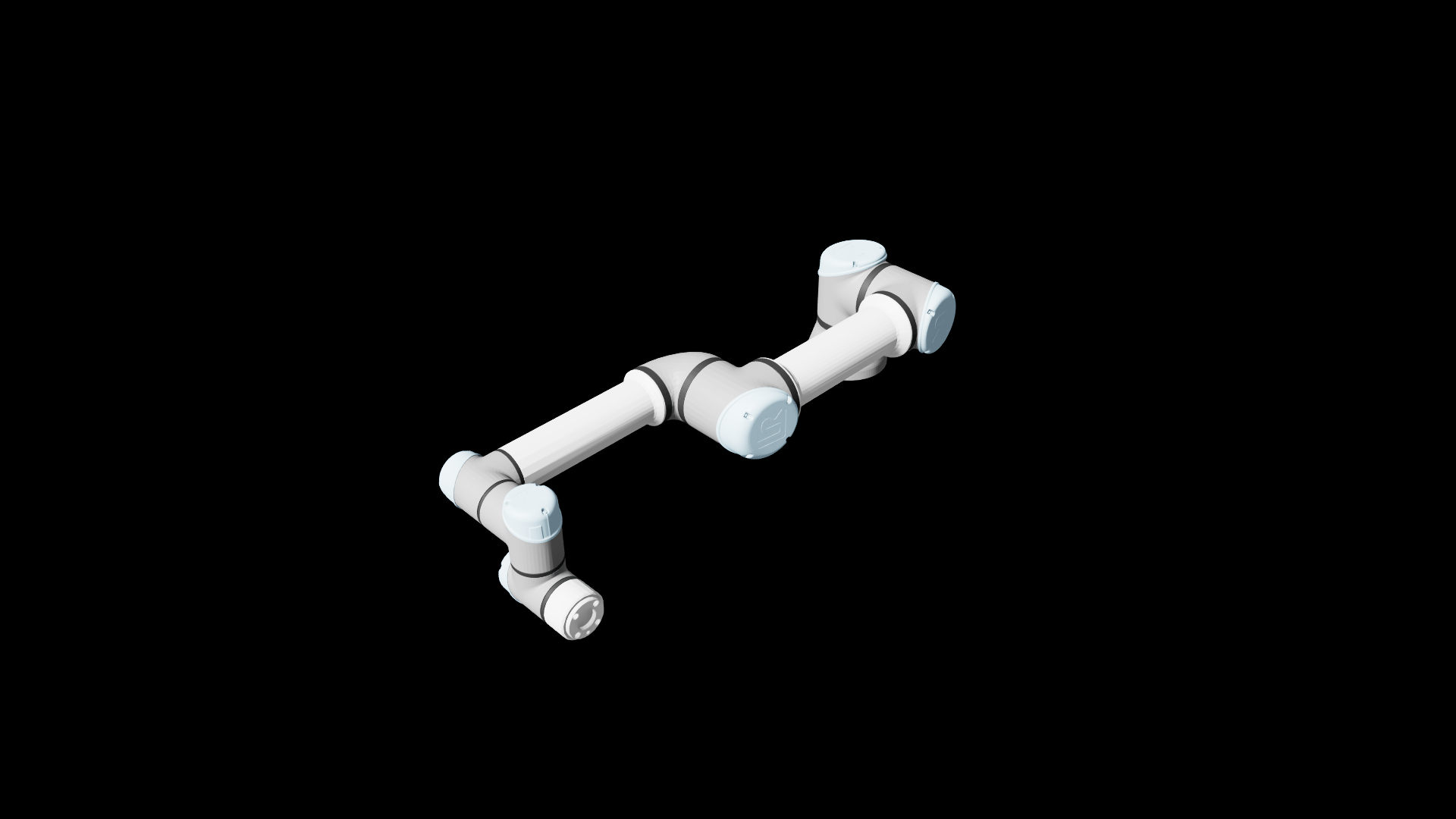
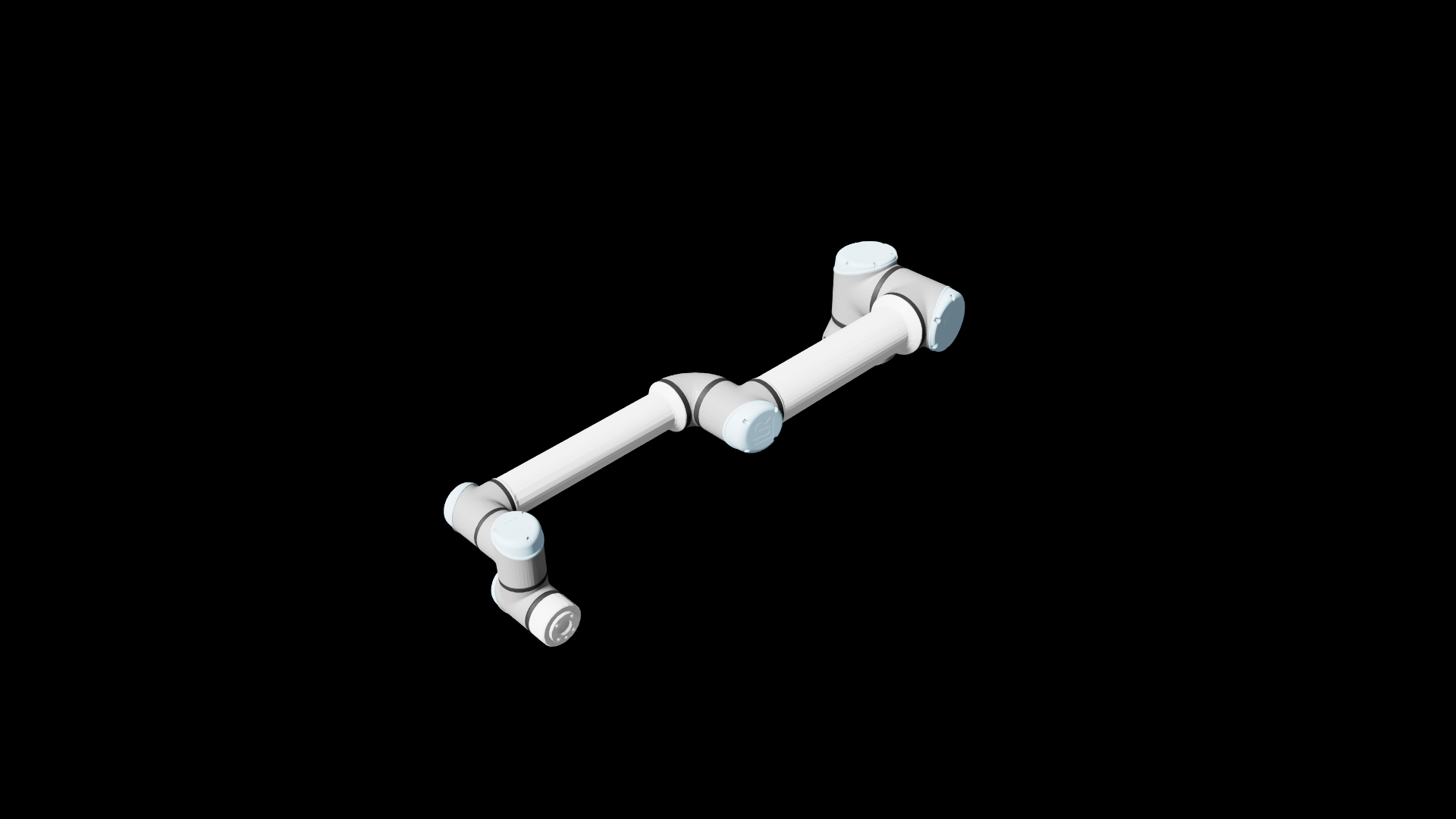
Universal Robots
Omniverse Isaac Sim supports the following Universal Robots models: UR3/3e, UR5/5e, UR10/10e, UR16e, UR20, and UR30.
Assets Path: [Isaac Sim Assets Path]/Isaac/Robots/UniversalRobots/
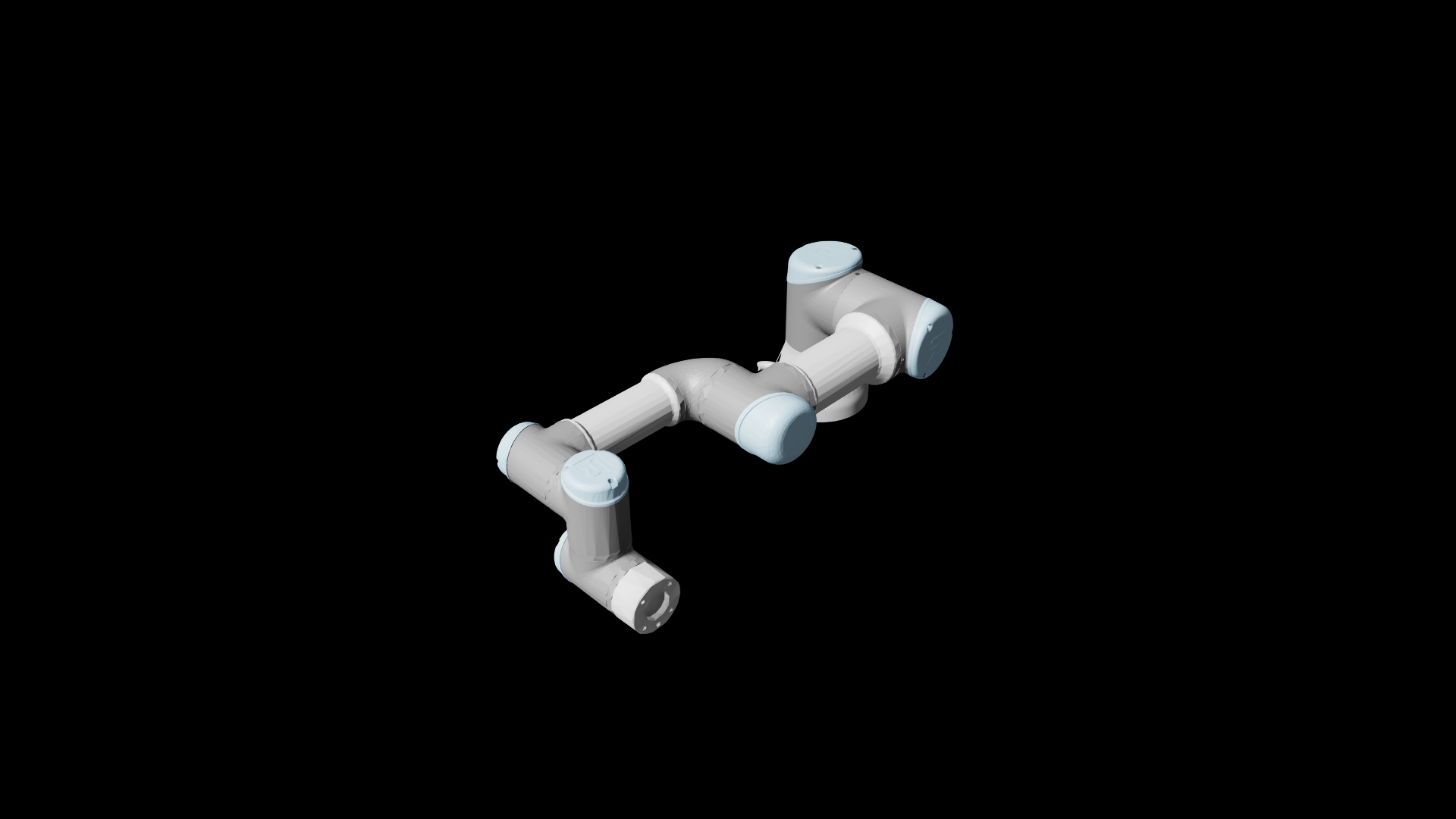
UR3 Model. To create the robot: Create>Isaac>Robots>Manipulator Robots>Universal Robots>UR3 |
UR3e Model. To create the robot: Create>Isaac>Robots>Manipulator Robots>Universal Robots>UR3e |
UR5 Model. To create the robot: Create>Isaac>Robots>Manipulator Robots>Universal Robots>UR5 |
UR5e Model. To create the robot: Create>Isaac>Robots>Manipulator Robots>Universal Robots>UR5e |

UR10 Model. To create the robot: Create>Isaac>Robots>Manipulator Robots>Universal Robots>UR10 |
UR10e Model. To create the robot: Create>Isaac>Robots>Manipulator Robots>Universal Robots>UR10e |
UR16e Model. To create the robot: Create>Isaac>Robots>Manipulator Robots>Universal Robots>UR16e |

UR20 Model. To create the robot: Create>Isaac>Robots>Manipulator Robots>Universal Robots>UR20 |

UR30 Model. To create the robot: Create>Isaac>Robots>Manipulator Robots>Universal Robots>UR30 |
The UR10 model also has three additional configurations. The first is a base version, which has no end effector and is used to compose the other versions. The second model has a wrist camera mount and a suction cup end effector, while the third version contains a larger vacuum gripper system.
Assets Path: [Isaac Sim Assets Path]/Isaac/Robots/UR10/
Base, No End Effector. To create the robot: Create>Isaac>Robots>Manipulator Robots>Universal Robots>UR10 |
Short Suction Gripper. To create the robot: Create>Isaac>Robots>Manipulator Robots>Universal Robots>UR10 (short suction gripper) |
Long Suction Gripper. To create the robot: Create>Isaac>Robots>Manipulator Robots>Universal Robots>UR10 (long suction gripper) |
Shadow Robot: Shadow Hand
The Shadow dexterous robotic hand developed by Shadow Robot features 24 Revolute Joints between the arm, palm, and fingers to emulate human movement.

Asset Path: [Isaac Sim Assets Path]/Isaac/Robots/ShadowHand/#
shadow_hand.usd- Base Version. Not included in Create menu.shadow_hand_instanceable.usd- Base version set up to create multiple efficient clones for RL scenarios. To create the robot: Create>Isaac>End Effectors>Shadow Hand
Wonik Robotics: Allegro Hand
The Allegro robotic hand developed by Wonik Robotics features 16 torque-controlled joints represented by Revolute Joints in Omniverse Isaac Sim.
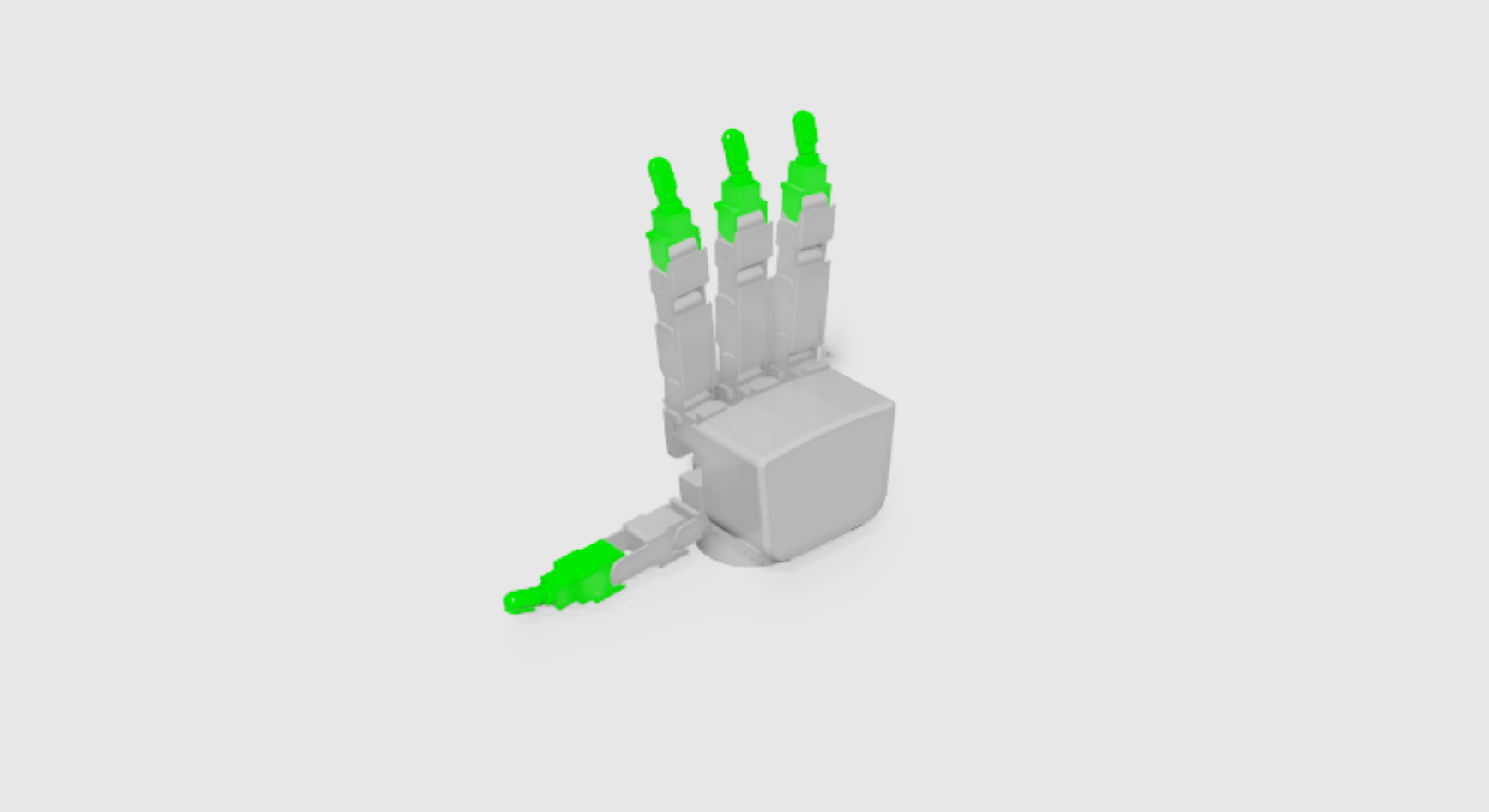
Asset Path: [Isaac Sim Assets Path]/Isaac/Robots/AllegroHand/#
allegro_hand.usd- Base Version. Not included in Create menu.allegro_hand_instanceable.usd- Base version set up to create multiple efficient clones for RL scenarios. To create the robot: Create>Isaac>End Effectors>Allegro Hand
Crazyflie
The Crazyflie 2.X micro quadcopter robot.

Asset Path: [Isaac Sim Assets Path]/Isaac/Robots/Crazyflie/cf2x.usd#
To create the robot: Create>Isaac>Robots>Aerial Robots>Crazyflie 2.x
Ingenuity
The Mars Helicopter, Ingenuity.

Asset Path: [Isaac Sim Assets Path]/Isaac/Robots/Ingenuity/ingenuity.usd#
To create the robot: Create>Isaac>Robots>Aerial Robots>Ingenuity
Quadcopter
Generic quadcopter robot.
Asset Path: [Isaac Sim Assets Path]/Isaac/Robots/Quadcopter/quadcopter.usd#
To create the robot: Create>Isaac>Robots>Aerial Robots>Quadcopter
1X NEO

Asset Path: [Isaac Sim Assets Path]/Isaac/Robots/1X/Neo/neo.usd#
To create the robot: Create>Isaac>Robots>Humanoid Robots>1X>NEO
Agility Digit
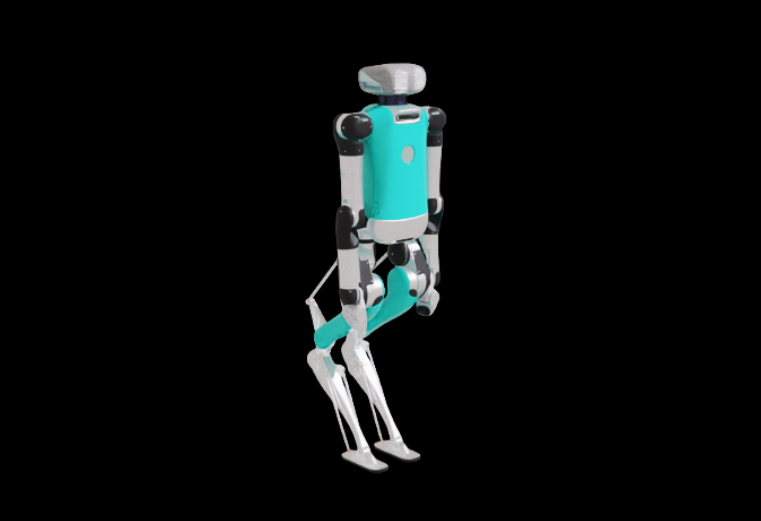
Asset Path: [Isaac Sim Assets Path]/Isaac/Robots/Agility/Digit/digit_v4.usd#
To create the robot: Create>Isaac>Robots>Humanoid Robots>Agility>Digit
Fourier Intelligence GR1
Asset Path: [Isaac Sim Assets Path]/Isaac/Robots/FourierIntelligence/GR-1/
To create the robot: Create>Isaac>Robots>Humanoid Robots>Fourier Intelligence>GR1 T1 |

To create the robot: Create>Isaac>Robots>Humanoid Robots>Fourier Intelligence>GR1 T2 |
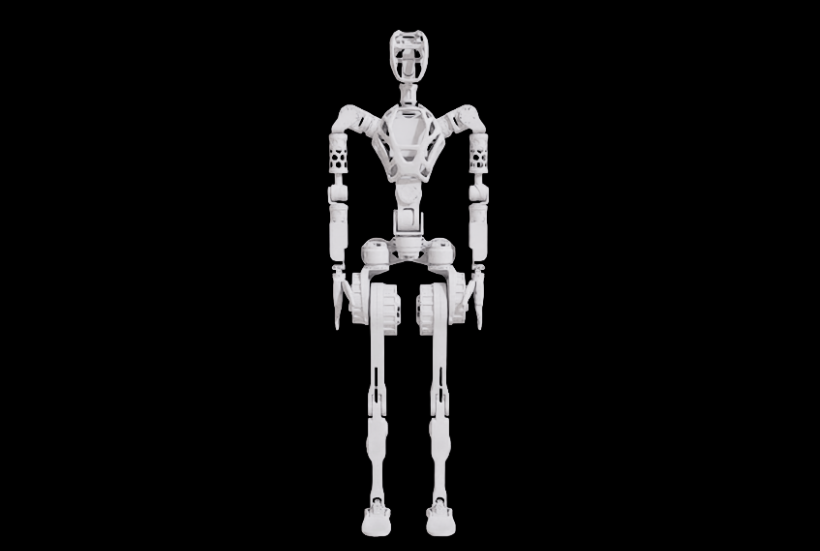
Sanctuary AI Phoenix
Asset Path: [Isaac Sim Assets Path]/Isaac/Robots/SanctuaryAI/Phoenix/phoenix.usd#
To create the robot: Create>Isaac>Robots>Humanoid Robots>Sanctuary AI>Phoenix
Unitree Humanoids
Assets Path: [Isaac Sim Assets Path]/Isaac/Robots/Unitree/
To create the robot: Create>Isaac>Robots>Humanoid Robots>Unitree>G1 |
To create the robot: Create>Isaac>Robots>Humanoid Robots>Unitree>H1 |
Xiao Peng PX5
Asset Path: [Isaac Sim Assets Path]/Isaac/Robots/XiaoPeng/PX5/