The content of this tutorial is currently broken due to the removal of the Node Description Editor dependency in Omniverse Kit.
An alternative solution will be proposed in future releases.
This is an optional, advanced tutorial where you will learn how to
Use ROS 2 rclpy Python interface with Isaac Sim
Create a simple custom OmniGraph Python node which can subscribe to multiple topics and perform computations on the subscribed data and generate an output.
Make sure to source your ROS 2 installation from the terminal before running Isaac Sim. If sourcing ROS 2 is a part of your bashrc then Isaac Sim can be run directly.
Prerequisite
Completed ROS and ROS 2 Installation: installed ROS2, enabled the ROS2 extension, built the provided Isaac Sim ROS 2 workspace, and set up the necessary environment variables.
This extension will be dependant on the ROS 2 Bridge. In order to add this dependency, open a file browser to the root of the extension folder. Then open the file at config/extension.toml. Look for [dependencies] section and add the following line under it. Save and close.
"omni.isaac.ros2_bridge"={}
Back in the OmniGraph node editor window, click Edit Node and wait for a text editor to open. Proceed to the next section.
First add the relevant import statements to the node template.
importomni# OgnROS2CustomPythonNodeDatabase module is an autogenerated python module located in the extension and is used later on.fromomni.new.extension.ogn.OgnROS2CustomPythonNodeDatabaseimportOgnROS2CustomPythonNodeDatabaseimportrclpyfromstd_msgs.msgimportInt32# BaseResetNode class is used for resetting the node when stopping and playingfromomni.isaac.core_nodesimportBaseResetNode
Implement a class to store the internal state of the node as shown below. This class inherits from BaseResetNode which automatically registers the custom_reset function to a stage event such that any time simulation is stopped, custom_reset will be called.
OgnROS2CustomPythonNodeInternalState will be accessed within the compute function and release function later on.
classOgnROS2CustomPythonNodeInternalState(BaseResetNode):def__init__(self):self.node=Noneself.numA=Noneself.numB=Noneself.subscriptionA=Noneself.subscriptionB=Nonesuper().__init__(initialize=False)deflistener_callbackA(self,msg):self.numA=msg.datadeflistener_callbackB(self,msg):self.numB=msg.datadefinitialize_ros2_node(self,node_name):try:rclpy.init()except:passself.node=rclpy.create_node(node_name)self.initialized=Truedefcreate_subscriberA(self,topicName):self.topicNameA=topicNameself.subscriptionA=self.node.create_subscription(Int32,self.topicNameA,self.listener_callbackA,10)defcreate_subscriberB(self,topicName):self.topicNameB=topicNameself.subscriptionB=self.node.create_subscription(Int32,self.topicNameB,self.listener_callbackB,10)# Overriding a function from BaseResetNode.# This is automatically called when simulation is stopped.# This is will also be called when the OmniGraph node is released.defcustom_reset(self):ifself.node:self.node.destroy_subscription(self.subscriptionA)self.node.destroy_subscription(self.subscriptionB)self.node.destroy_node()self.numA=Noneself.numB=Noneself.subscriptionA=Noneself.subscriptionB=Noneself.node=Noneself.initialized=Falserclpy.try_shutdown()
Within the OgnROS2CustomPythonNode class add in a static method for internal_state as shown below:
@staticmethoddefcompute(db)->bool:"""Compute the outputs from the current input"""state=db.per_instance_statetry:ifnotstate.initialized:state.initialize_ros2_node('custom_python_adder')if(state.subscriptionA==None):state.create_subscriberA(db.inputs.topicInputA)if(state.subscriptionB==None):state.create_subscriberB(db.inputs.topicInputB)rclpy.spin_once(state.node,timeout_sec=0.01)ifstate.numA!=Noneandstate.numB!=None:db.outputs.sum=state.numA+state.numBdb.outputs.execOut=omni.graph.core.ExecutionAttributeState.ENABLED# Set the numA and numB to None to ensure we only calculate and trigger execOut when new messages are received.state.numA=Nonestate.numB=NoneexceptExceptionaserror:# If anything causes your compute to fail report the error and return Falsedb.log_error(str(error))returnFalse# Even if inputs were edge cases like empty arrays, correct outputs mean successreturnTrue
Finally setup the release function as shown below. This function is called when the OmniGraph node is deleted or the stage is cleared.
Click to expand and see the full Ogn and Python files…
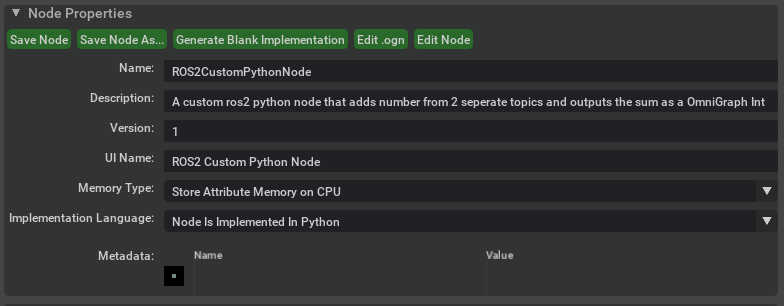
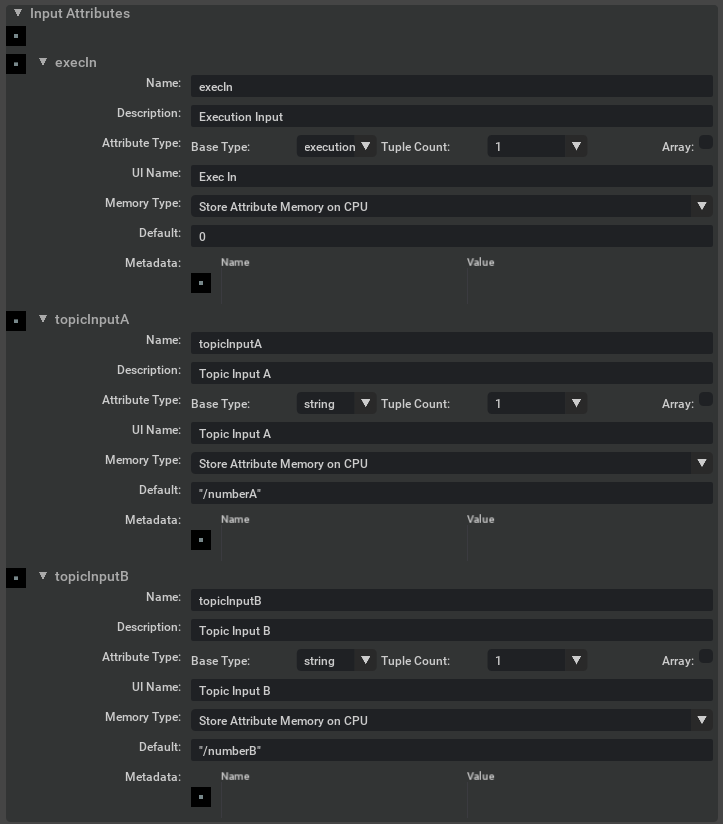
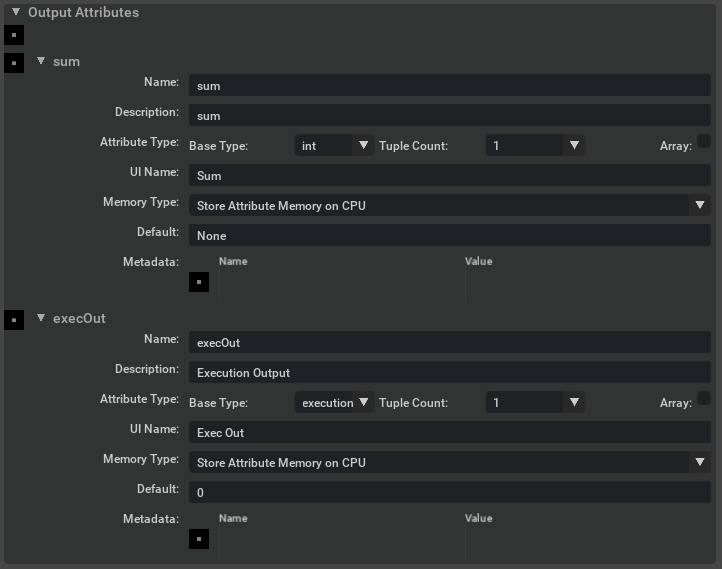
{"ROS2CustomPythonNode":{"version":1,"description":"A custom ros2 python node that adds number from 2 separate topics and outputs the sum as a OmniGraph Int","language":"Python","metadata":{"uiName":"ROS2 Custom Python Node"},"inputs":{"execIn":{"type":"execution","description":"Execution Input","default":0,"metadata":{"uiName":"Exec In"}},"topicInputA":{"type":"string","description":"Topic Input A","metadata":{"uiName":"Topic Input A"},"default":"/numberA"},"topicInputB":{"type":"string","description":"Topic Input B","metadata":{"uiName":"Topic Input B"},"default":"/numberB"}},"outputs":{"sum":{"type":"int","description":"sum","metadata":{"uiName":"Sum"}},"execOut":{"type":"execution","description":"Execution Output","metadata":{"uiName":"Exec Out"},"default":0}}}}
# Copyright (c) 2020-2024, NVIDIA CORPORATION. All rights reserved.## NVIDIA CORPORATION and its licensors retain all intellectual property# and proprietary rights in and to this software, related documentation# and any modifications thereto. Any use, reproduction, disclosure or# distribution of this software and related documentation without an express# license agreement from NVIDIA CORPORATION is strictly prohibited.#"""This is the implementation of the OGN node defined in OgnROS2CustomPythonNode.ogn"""# Array or tuple values are accessed as numpy arrays so you probably need this importimportnumpyimportomni# OgnROS2CustomPythonNodeDatabase module is an autogenerated python module located in the extension and is used later on.fromomni.new.extension.ogn.OgnROS2CustomPythonNodeDatabaseimportOgnROS2CustomPythonNodeDatabaseimportrclpyfromstd_msgs.msgimportInt32# BaseResetNode class is used for resetting the node when stopping and playingfromomni.isaac.core_nodesimportBaseResetNodeclassOgnROS2CustomPythonNodeInternalState(BaseResetNode):def__init__(self):self.node=Noneself.numA=Noneself.numB=Noneself.subscriptionA=Noneself.subscriptionB=Nonesuper().__init__(initialize=False)deflistener_callbackA(self,msg):self.numA=msg.datadeflistener_callbackB(self,msg):self.numB=msg.datadefinitialize_ros2_node(self,node_name):try:rclpy.init()except:passself.node=rclpy.create_node(node_name)self.initialized=Truedefcreate_subscriberA(self,topicName):self.topicNameA=topicNameself.subscriptionA=self.node.create_subscription(Int32,self.topicNameA,self.listener_callbackA,10)defcreate_subscriberB(self,topicName):self.topicNameB=topicNameself.subscriptionB=self.node.create_subscription(Int32,self.topicNameB,self.listener_callbackB,10)# Overriding a function from BaseResetNode.# This is automatically called when simulation is stopped.# This is will also be called when the OmniGraph node is released.defcustom_reset(self):ifself.node:self.node.destroy_subscription(self.subscriptionA)self.node.destroy_subscription(self.subscriptionB)self.node.destroy_node()self.numA=Noneself.numB=Noneself.subscriptionA=Noneself.subscriptionB=Noneself.node=Noneself.initialized=Falserclpy.try_shutdown()classOgnROS2CustomPythonNode:""" A custom ros2 python node that adds number from 2 separate topics and outputs the sum as a OmniGraph Int """@staticmethoddefinternal_state():returnOgnROS2CustomPythonNodeInternalState()@staticmethoddefcompute(db)->bool:"""Compute the outputs from the current input"""state=db.per_instance_statetry:ifnotstate.initialized:state.initialize_ros2_node('custom_python_adder')if(state.subscriptionA==None):state.create_subscriberA(db.inputs.topicInputA)if(state.subscriptionB==None):state.create_subscriberB(db.inputs.topicInputB)rclpy.spin_once(state.node,timeout_sec=0.01)ifstate.numA!=Noneandstate.numB!=None:db.outputs.sum=state.numA+state.numBdb.outputs.execOut=omni.graph.core.ExecutionAttributeState.ENABLED# Set the numA and numB to None to ensure we only calculate and trigger execOut when new messages are received.state.numA=Nonestate.numB=NoneexceptExceptionaserror:# If anything causes your compute to fail report the error and return Falsedb.log_error(str(error))returnFalse# Even if inputs were edge cases like empty arrays, correct outputs mean successreturnTrue@staticmethoddefrelease(node):try:state=OgnROS2CustomPythonNodeDatabase.per_instance_internal_state(node)exceptException:state=NoneifstateisnotNone:state.custom_reset()
Open new stage and go to Create -> Visual Scripting -> Action Graph to create an Action graph.
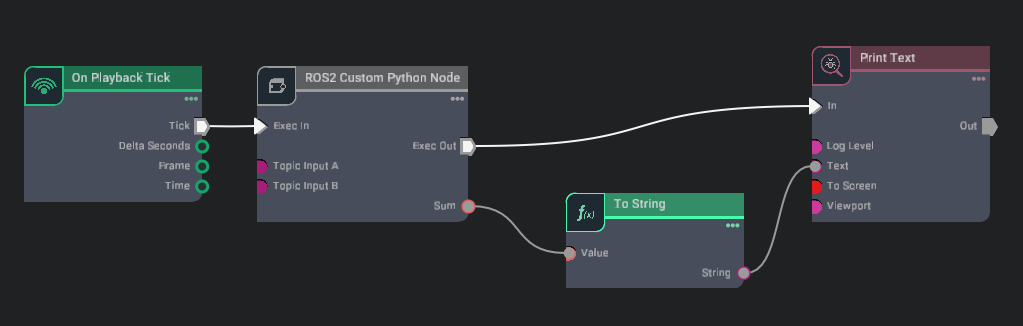
Add the following OmniGraph nodes into the Action graph and connect them as shown.
On Playback Tick node to execute other graph nodes every simulation frame.
ROS2 Custom Python Node that we just created above.
To String node to convert the output of our custom node to a string.
Print Text node to display the output of our custom node to screen or terminal.
Select the Print Text node and set the toScreen attribute to True.
In a new ROS2-sourced terminal, run the following command to publish a number to the /numberA topic.
ros2topicpub/numberAstd_msgs/msg/Int32"data: 42"
In another ROS2-sourced terminal, run the following command to publish a number to the /numberB topic.
ros2topicpub/numberBstd_msgs/msg/Int32"data: 240"
In Isaac Sim, click on Play to start simulation. Once messages are being received from both topics, the sum of the two numbers will appear in the top left corner of the viewport.
Whenever any of the topics are disconnected, the outputs won’t be triggered and the sum display will fade away.
Note
To view the values in the Isaac Sim console, you can select the Print Text node, set the toScreen attribute to False and set the logLevel attribute to Warning.
Change any of the publish commands from earlier with different numbers and notice the sum change.
Creating a custom OmniGraph Python node and extension
Using rclpy interface to create a ROS 2 node within a custom OmniGraph node capable of subscribing to multiple topics, performing computations and trigger downstream nodes when the computed OmniGraph output is ready.