Non-Visual Sensors#
The non-visual sensor schemata are supplied by the omni.usd.schema.omni_sensors extension, which must be loaded to use the schemata described here.
To create a lidar, or radar, create an OmniLidar or OmniRadar prim, and apply the appropriate schema to it. For OmniLidar sensors this is OmniSensorGenericLidarCoreAPI, while for OmniRadar sensors this is OmniSensorGenericRadarWpmDmatAPI.
Each of the applied API schemata has a corresponding multi-apply API for configuring each emitter state (in the case of lidar) or scan (in the case of radar) of the sensor. Each instance of the applied API corresponds to one emitter state, and they will be ordered lexicographically according to the name of the API instance. For lidar the multi-apply API is OmniSensorGenericLidarCoreEmitterStateAPI, while for radar it is OmniSensorGenericRadarWpmDmatScanCfgAPI.
How to Add Schemata to Sensors
Schemata can be applied using the OpenUSD Python API :
lidar_prim = stage.DefinePrim("/World/Lidar", "OmniLidar")
lidar_prim.ApplyAPI("OmniSensorGenericLidarCoreAPI")
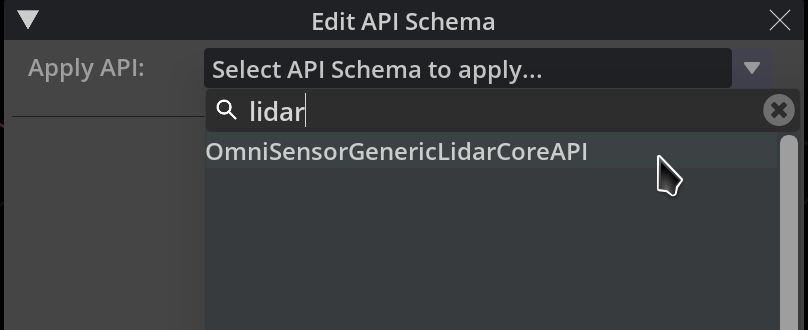
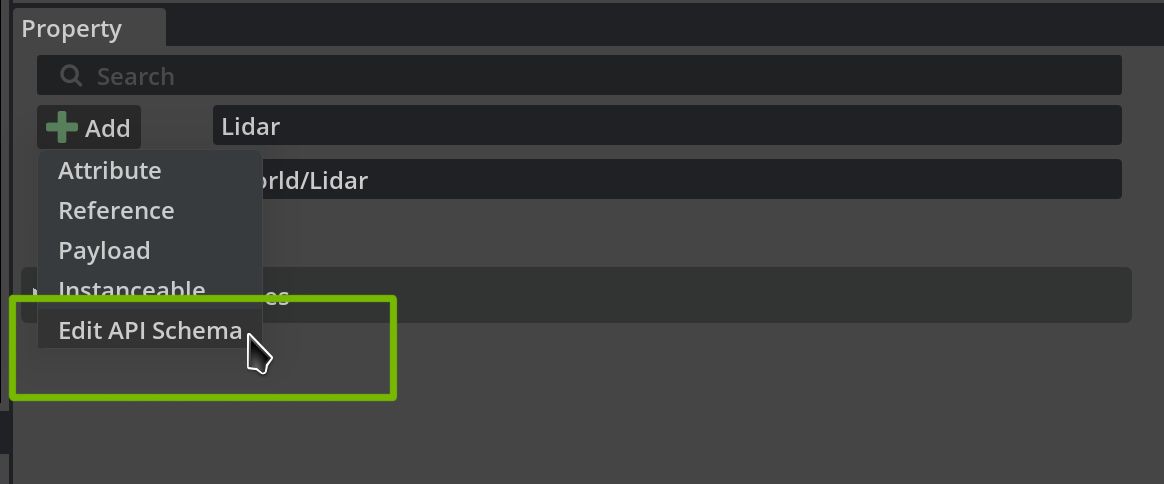
or by using the omni.kit.widget.schema_api extension. The Schema API widget adds functionality for adding a schema to a prim from the Property Window:
Schema Reference#
OmniLidar#
| Name | Type | Default |
|---|---|---|
| proxyPrim | rel | |
| The proxyPrim relationship allows us to link a prim whose purpose is "render" to its (single target) purpose="proxy" prim. This is entirely optional, but can be useful in several scenarios: - In a pipeline that does pruning (for complexity management) by deactivating prims composed from asset references, when we deactivate a purpose="render" prim, we will be able to discover and additionally deactivate its associated purpose="proxy" prim, so that preview renders reflect the pruning accurately. - DCC importers may be able to make more aggressive optimizations for interactive processing and display if they can discover the proxy for a given render prim. - With a little more work, a Hydra-based application will be able to map a picked proxy prim back to its render geometry for selection. NOTE: It is only valid to author the proxyPrim relationship on prims whose purpose is "render". | ||
| purpose | token | "default" |
| Allowed tokens: "default", "render", "proxy", "guide" Purpose is a classification of geometry into categories that can each be independently included or excluded from traversals of prims on a stage, such as rendering or bounding-box computation traversals. See for more detail about how purpose is computed and used. | ||
| visibility | token | "inherited" |
| Allowed tokens: "inherited", "invisible" Visibility is meant to be the simplest form of "pruning" visibility that is supported by most DCC apps. Visibility is animatable, allowing a sub-tree of geometry to be present for some segment of a shot, and absent from others; unlike the action of deactivating geometry prims, invisible geometry is still available for inspection, for positioning, for defining volumes, etc. | ||
| xformOpOrder | token[] | None |
| Encodes the sequence of transformation operations in the order in which they should be pushed onto a transform stack while visiting a UsdStage's prims in a graph traversal that will effect the desired positioning for this prim and its descendant prims. You should rarely, if ever, need to manipulate this attribute directly. It is managed by the AddXformOp(), SetResetXformStack(), and SetXformOpOrder(), and consulted by GetOrderedXformOps() and GetLocalTransformation(). | ||
OmniSensorGenericLidarCoreAPI#
API Defines generic lidar using Core model
| Name | Type | Default |
|---|---|---|
| omni:sensor:Core:aspectRatio | float | 1.0 |
| Aspect ratio of the detector | ||
| omni:sensor:Core:auxOutputType | token | "NONE" |
| Allowed tokens: "NONE", "BASIC", "EXTRA", "FULL" sets the desired level of detail of the output auxiliary data; Runtime changes not supported, yet. | ||
| omni:sensor:Core:avgPowerW | float | 0.002 |
| Average power per emitter in watts | ||
| omni:sensor:Core:azimuthErrorMean | float | 0.0 |
| Mean value of the azimuth error in degrees | ||
| omni:sensor:Core:azimuthErrorStd | float | 0.005 |
| Standard deviation of the azimuth error in degrees | ||
| omni:sensor:Core:beamWaistHorM | float | 0.002 |
| Beam waist horizontal of the sensor in meters | ||
| omni:sensor:Core:beamWaistVerM | float | 0.002 |
| Beam waist vertical of the sensor in meters | ||
| omni:sensor:Core:bitDepthResolution | float | 6.5536e+04 |
| Bit depth resolution of the sensor | ||
| omni:sensor:Core:calibrationGain | float | 40.0 |
| Calibration gain of the sensor | ||
| omni:sensor:Core:customFrameOfReferenceTrafo | float[] | [0.0, 0.0, 0.0, ... 0.0] |
| used only if outputFrameOfReference = CUSTOM. defines the transformation for the custom frame of reference. structured as [x,y,z,roll,pitch,yaw]; Runtime changes not supported, yet. | ||
| omni:sensor:Core:divergenceHorDeg | float | 0.0 |
| Divergence horizontal of the sensor in degrees | ||
| omni:sensor:Core:divergenceVerDeg | float | 0.0 |
| Divergence vertical of the sensor in degrees | ||
| omni:sensor:Core:effectiveApertureSizeM | float | 0.01 |
| Effective aperture size of the sensor in meters | ||
| omni:sensor:Core:elementsCoordsType | token | "SPHERICAL" |
| Allowed tokens: "CARTESIAN", "SPHERICAL" sets the desired coordinate system for the output basic elements (not auxiliary data)); Runtime changes not supported, yet. | ||
| omni:sensor:Core:elevationErrorMean | float | 0.0 |
| Mean value of the elevation error in degrees | ||
| omni:sensor:Core:elevationErrorStd | float | 0.0 |
| Standard deviation of the elevation error in degrees | ||
| omni:sensor:Core:emitterStatesFile | string | "" |
| File containing the emitter states of the sensor; Not supported, yet. | ||
| omni:sensor:Core:farRangeM | float | 200.0 |
| Maximum range of the sensor in meters | ||
| omni:sensor:Core:focusDistM | float | 0.15 |
| Focus distance of the sensor in meters | ||
| omni:sensor:Core:intensityMappingDecoding | float[] | [] |
| Intensity mapping decoding; Changing the number of elements at runtime is not supported. | ||
| omni:sensor:Core:intensityMappingEncoding | float[] | [] |
| Intensity mapping encoding; Changing the number of elements at runtime is not supported. | ||
| omni:sensor:Core:intensityMappingType | token | "LINEAR" |
| Allowed tokens: "LINEAR", "NONLINEAR", "NONLINEAR_ENCODING_ONLY", "NONLINEAR_DECODING_ONLY" Intensity mapping type | ||
| omni:sensor:Core:intensityProcessing | token | "NORMALIZATION" |
| Allowed tokens: "RAW", "NORMALIZATION", "CORRECTION" Intensity processing mode | ||
| omni:sensor:Core:intensityScalePercent | float | 255.0 |
| Intensity scale percent | ||
| omni:sensor:Core:maxAzimuthROI | float | 400.0 |
| End azimuth point of the ROI part of the pattern -- in sensor market model frame | ||
| omni:sensor:Core:maxReturns | uint | 2 |
| Maximum number of returns of the sensor; Runtime changes not supported, yet. | ||
| omni:sensor:Core:minAzimuthROI | float | 400.0 |
| Start azimuth point of the ROI part of the pattern -- in sensor market model frame | ||
| omni:sensor:Core:minDistBetweenEchosM | float | 0.4 |
| Minimum distance between two echos in meters | ||
| omni:sensor:Core:minReflectance | float | 0.1 |
| Minimum reflectance value of an object for a guarantueed Pointcloud at minReflectionRange | ||
| omni:sensor:Core:minReflectionRangeM | float | 200.0 |
| Minimum range for a guaranteed detection of an object with minReflectance | ||
| omni:sensor:Core:Msquared | float | 1.4 |
| M squared value of the sensor | ||
| omni:sensor:Core:nearRangeM | float | 0.3 |
| Minimum range of the sensor in meters | ||
| omni:sensor:Core:numberOfChannels | uint | 128 |
| Number of channels of the sensor; Runtime changes not supported, yet. | ||
| omni:sensor:Core:numberOfEmitters | uint | 128 |
| Number of emitters of the sensor; Runtime changes not supported, yet. | ||
| omni:sensor:Core:numLines | uint | 0 |
| Number of lines of the sensor; Runtime changes not supported, yet. | ||
| omni:sensor:Core:numRaysPerLine | uint[] | [] |
| Number of points per line of the sensor; Has numLines elements; Changing the number of elements at runtime is not supported. | ||
| omni:sensor:Core:originErrorMean | float[] | [0, 0, 0] |
| Mean value of the origin error in meters | ||
| omni:sensor:Core:originErrorStd | float[] | [0, 0, 0] |
| Standard deviation of the origin error in meters | ||
| omni:sensor:Core:outputFrameOfReference | token | "SENSOR" |
| Allowed tokens: "SENSOR", "WORLD", "CUSTOM" sets the desired frame of reference for all outputs (including auxiliary data); Runtime changes not supported, yet. | ||
| omni:sensor:Core:outputMotionCompensationState | token | "NONCOMPENSATED" |
| Allowed tokens: "NONCOMPENSATED", "COMPENSATED" sets the desired motion compensation state for all outputs (including auxiliary data); Runtime changes not supported, yet. | ||
| omni:sensor:Core:pixelPitch | float | 40.0 |
| Pixel pitch of the detector | ||
| omni:sensor:Core:pulseTimeNs | uint | 6 |
| Pulse time of the sensor in ns | ||
| omni:sensor:Core:quantumEfficiency | float | 0.9 |
| Quantum efficiency of the detector | ||
| omni:sensor:Core:rangeAccuracyM | float | 0.02 |
| Range accuracy of the sensor in meters | ||
| omni:sensor:Core:rangeCount | uint | 0 |
| Number of range regions of the emitters | ||
| omni:sensor:Core:rangeOffsetM | float | 0.0 |
| Range for which objects are invisible -- useful for sensors inside objects | ||
| omni:sensor:Core:rangeResolutionM | float | 0.004 |
| Range resolution of the sensor in meters | ||
| omni:sensor:Core:rangesMaxM | float[] | [] |
| Maximum ranges of the emitters in meters; Has rangeCount elements; Changing the number of elements at runtime is not supported. | ||
| omni:sensor:Core:rangesMinM | float[] | [] |
| Minimum ranges of the emitters in meters; Has rangeCount elements; Changing the number of elements at runtime is not supported. | ||
| omni:sensor:Core:rayType | token | "IDEALIZED" |
| Allowed tokens: "IDEALIZED", "GAUSSIAN_BEAM", "UNIFORM_BEAM" Ray type of the sensor; Runtime changes not supported, yet. | ||
| omni:sensor:Core:reflectionPowerFraction | float | 0.5 |
| Fraction of the reflection power for multiple returns. | ||
| omni:sensor:Core:reportRateBaseHz | uint | 36000 |
| Report rate base of the sensor in Hz; Runtime changes not supported, yet. | ||
| omni:sensor:Core:rotationDirection | token | "CW" |
| Allowed tokens: "CW", "CCW" Rotation direction of the sensor -- only for rotary sensors | ||
| omni:sensor:Core:scanRateBaseHz | uint | 10 |
| Scan rate base of the sensor in Hz; Runtime changes not supported, yet. | ||
| omni:sensor:Core:scanType | token | "ROTARY" |
| Allowed tokens: "ROTARY", "SOLID_STATE" Scanning principle of the sensor; Runtime changes not supported, yet. | ||
| omni:sensor:Core:skipDroppingInvalidPoints | bool | 0 |
| when false the model will drop invalid points; Runtime changes not supported, yet. | ||
| omni:sensor:Core:startAzimuthOffsetDeg | float | 0.0 |
| Start azimuth offset angle of the sensor in degrees -- in sensor market model frame | ||
| omni:sensor:Core:stateResolutionStep | uint | 1 |
| State resolution step of the sensor -- Handles switching between states | ||
| omni:sensor:Core:transmissionPowerFraction | float | 1.0 |
| Fraction of the transmission power for multiple returns. | ||
| omni:sensor:Core:validEndAzimuthDeg | float | 360.0 |
| Valid end azimuth angle of the sensor in degrees -- in sensor market model frame | ||
| omni:sensor:Core:validStartAzimuthDeg | float | 0.0 |
| Valid start azimuth angle of the sensor in degrees -- in sensor market model frame | ||
| omni:sensor:Core:waveLengthNm | float | 903.0 |
| Wavelength of the sensor in nm | ||
| omni:sensor:marketName | string | "Generic" |
| omni:sensor:modelName | string | "LidarCore" |
| omni:sensor:modelVendor | string | "NVIDIA" |
| omni:sensor:modelVersion | string | "0.0.0" |
| omni:sensor:tickRate | float | 10.0 |
OmniSensorGenericLidarCoreEmitterStateAPI#
API Defines generic lidar emitter state
| Name | Type | Default |
|---|---|---|
| omni:sensor:Core:emitterState:__INSTANCE_NAME__:azimuthDeg | float[] | [-3.0, -3.0, -3.0, ... 3.0] |
| Azimuth of the emitters in degrees; Has numberOfEmitters elements; Changing the number of elements at runtime is not supported. | ||
| omni:sensor:Core:emitterState:__INSTANCE_NAME__:bank | uint[] | [] |
| Bank/line of the emitters; Has numberOfEmitters elements or empty; Changing the number of elements at runtime is not supported. | ||
| omni:sensor:Core:emitterState:__INSTANCE_NAME__:channelId | uint[] | [1, 2, 3, ... 128] |
| Corresponding channel id of the emitters; Has numberOfEmitters elements; Changing the number of elements at runtime is not supported. | ||
| omni:sensor:Core:emitterState:__INSTANCE_NAME__:distanceCorrectionM | float[] | [] |
| Distance correction of the emitters in meters; Has numberOfEmitters elements or empty; Changing the number of elements at runtime is not supported. | ||
| omni:sensor:Core:emitterState:__INSTANCE_NAME__:elevationDeg | float[] | [-15.0, -14.1899995803833, -13.390000343322754, ... 10.0] |
| Elevation of the emitters in degrees; Has numberOfEmitters elements; Changing the number of elements at runtime is not supported. | ||
| omni:sensor:Core:emitterState:__INSTANCE_NAME__:fireTimeNs | uint[] | [0, 0, 0, ... 24500] |
| Fire time of the emitters in ns -- delta to the azimuth tick start time; Has numberOfEmitters elements; Changing the number of elements at runtime is not supported. | ||
| omni:sensor:Core:emitterState:__INSTANCE_NAME__:focalDistM | float[] | [] |
| Focal distance of the emitters in meters; Has numberOfEmitters elements or empty; Changing the number of elements at runtime is not supported. | ||
| omni:sensor:Core:emitterState:__INSTANCE_NAME__:focalSlope | float[] | [] |
| Focal slope of the emitters; Has numberOfEmitters elements or empty; Changing the number of elements at runtime is not supported. | ||
| omni:sensor:Core:emitterState:__INSTANCE_NAME__:horOffsetM | float[] | [] |
| Horizontal offset of the emitters in meters; Has numberOfEmitters elements or empty; Changing the number of elements at runtime is not supported. | ||
| omni:sensor:Core:emitterState:__INSTANCE_NAME__:isROIState | bool | 0 |
| Is the emitter state a ROI state | ||
| omni:sensor:Core:emitterState:__INSTANCE_NAME__:rangeId | uint[] | [] |
| Corresponding range id of the emitters; Has numberOfEmitters elements or empty; Changing the number of elements at runtime is not supported. | ||
| omni:sensor:Core:emitterState:__INSTANCE_NAME__:reportRateDiv | float[] | [] |
| Report rate divisor of the emitters; Has numberOfEmitters elements or empty; Changing the number of elements at runtime is not supported. | ||
| omni:sensor:Core:emitterState:__INSTANCE_NAME__:roi | bool[] | [] |
| Is the emitter part of the ROI; Has numberOfEmitters elements or empty; Changing the number of elements at runtime is not supported. | ||
| omni:sensor:Core:emitterState:__INSTANCE_NAME__:vertOffsetM | float[] | [] |
| Vertical offset of the emitters in meters; Has numberOfEmitters elements or empty; Changing the number of elements at runtime is not supported. | ||
OmniRadar#
| Name | Type | Default |
|---|---|---|
| proxyPrim | rel | |
| The proxyPrim relationship allows us to link a prim whose purpose is "render" to its (single target) purpose="proxy" prim. This is entirely optional, but can be useful in several scenarios: - In a pipeline that does pruning (for complexity management) by deactivating prims composed from asset references, when we deactivate a purpose="render" prim, we will be able to discover and additionally deactivate its associated purpose="proxy" prim, so that preview renders reflect the pruning accurately. - DCC importers may be able to make more aggressive optimizations for interactive processing and display if they can discover the proxy for a given render prim. - With a little more work, a Hydra-based application will be able to map a picked proxy prim back to its render geometry for selection. NOTE: It is only valid to author the proxyPrim relationship on prims whose purpose is "render". | ||
| purpose | token | "default" |
| Allowed tokens: "default", "render", "proxy", "guide" Purpose is a classification of geometry into categories that can each be independently included or excluded from traversals of prims on a stage, such as rendering or bounding-box computation traversals. See for more detail about how purpose is computed and used. | ||
| visibility | token | "inherited" |
| Allowed tokens: "inherited", "invisible" Visibility is meant to be the simplest form of "pruning" visibility that is supported by most DCC apps. Visibility is animatable, allowing a sub-tree of geometry to be present for some segment of a shot, and absent from others; unlike the action of deactivating geometry prims, invisible geometry is still available for inspection, for positioning, for defining volumes, etc. | ||
| xformOpOrder | token[] | None |
| Encodes the sequence of transformation operations in the order in which they should be pushed onto a transform stack while visiting a UsdStage's prims in a graph traversal that will effect the desired positioning for this prim and its descendant prims. You should rarely, if ever, need to manipulate this attribute directly. It is managed by the AddXformOp(), SetResetXformStack(), and SetXformOpOrder(), and consulted by GetOrderedXformOps() and GetLocalTransformation(). | ||
OmniSensorGenericRadarWpmDmatAPI#
API Defines generic radar using WpmDMAT model
| Name | Type | Default |
|---|---|---|
| omni:sensor:marketName | string | "Generic" |
| omni:sensor:modelName | string | "RadarWPMDMAT" |
| omni:sensor:modelVendor | string | "NVIDIA" |
| omni:sensor:modelVersion | string | "0.0.0" |
| omni:sensor:tickRate | float | 20.0 |
| desired framerate of the radar; Runtime changes not supported, yet. | ||
| omni:sensor:WpmDmat:antennaGainMode | token | "COSINEFALLOFF" |
| Allowed tokens: "CONSTANT", "COSINEFALLOFF" antenna gain profile | ||
| omni:sensor:WpmDmat:auxOutputType | token | "NONE" |
| Allowed tokens: "NONE", "BASIC" sets the desired level of detail of the output auxiliary data; Runtime changes not supported, yet. | ||
| omni:sensor:WpmDmat:cfarMode | token | "2D" |
| Allowed tokens: "2D", "4D" cfar processing mode | ||
| omni:sensor:WpmDmat:customFrameOfReferenceTrafo | float[] | [0.0, 0.0, 0.0, ... 0.0] |
| used only if outputFrameOfReference = CUSTOM. defines the transformation for the custom frame of reference. structured as [x,y,z,roll,pitch,yaw]; Runtime changes not supported, yet. | ||
| omni:sensor:WpmDmat:elementsCoordsType | token | "SPHERICAL" |
| Allowed tokens: "CARTESIAN", "SPHERICAL" sets the desired coordinate system for the output basic elements (not auxiliary data)); Runtime changes not supported, yet. | ||
| omni:sensor:WpmDmat:instanceTimeOffsetUsec | uint | 5000 |
| time offset of this radar instance to simulate continuous firing in a group of radars; Runtime changes not supported, yet. | ||
| omni:sensor:WpmDmat:outputFrameOfReference | token | "SENSOR" |
| Allowed tokens: "SENSOR", "WORLD", "CUSTOM" sets the desired frame of reference for all outputs (including auxiliary data); Runtime changes not supported, yet. | ||
| omni:sensor:WpmDmat:traceTreeDepth | uint | 3 |
| max number of bounces to trace; Runtime changes not supported, yet. | ||
| omni:sensor:WpmDmat:waveLengthMm | float | 3.9 |
| operational wavelength of the radar; Runtime changes not supported, yet. | ||
OmniSensorGenericRadarWpmDmatScanCfgAPI#
API Defines generic radar scan configuration
| Name | Type | Default |
|---|---|---|
| omni:sensor:WpmDmat:scan:__INSTANCE_NAME__:azBins | uint | 12 |
| number of azimuth bins of the scan | ||
| omni:sensor:WpmDmat:scan:__INSTANCE_NAME__:azimuthRadNoiseMean | float | 0.0 |
| mean value of the azimuth noise in radians | ||
| omni:sensor:WpmDmat:scan:__INSTANCE_NAME__:azimuthRadNoiseSDev | float | 0.0 |
| standard deviation of the azimuth noise in radians | ||
| omni:sensor:WpmDmat:scan:__INSTANCE_NAME__:binsFromSpec | bool | 1 |
| deduce number of bins from spec parameters | ||
| omni:sensor:WpmDmat:scan:__INSTANCE_NAME__:boreAzResDeg | float | 1.3 |
| azimuth resolution of the scan in degrees at bore sight | ||
| omni:sensor:WpmDmat:scan:__INSTANCE_NAME__:boreElResDeg | float | 5.0 |
| elavation resolution of the scan in degrees at bore sight | ||
| omni:sensor:WpmDmat:scan:__INSTANCE_NAME__:cfarAznG | uint | 0 |
| cfar number of guard cells for the scan in azimuth dimension | ||
| omni:sensor:WpmDmat:scan:__INSTANCE_NAME__:cfarAznT | uint | 1 |
| cfar number of test cells for the scan in azimuth dimension | ||
| omni:sensor:WpmDmat:scan:__INSTANCE_NAME__:cfarElnG | uint | 0 |
| cfar number of guard cells for the scan in elevation dimension | ||
| omni:sensor:WpmDmat:scan:__INSTANCE_NAME__:cfarElnT | uint | 1 |
| cfar number of test cells for the scan in elevation dimension | ||
| omni:sensor:WpmDmat:scan:__INSTANCE_NAME__:cfarMinVal | float | 7e-17 |
| minimum energy value in a bin to be used in cfar detection | ||
| omni:sensor:WpmDmat:scan:__INSTANCE_NAME__:cfarNoiseMean | float | 0.0 |
| noise mean value for cfar detection | ||
| omni:sensor:WpmDmat:scan:__INSTANCE_NAME__:cfarNoiseSDev | float | 0.0 |
| noise standard deviation value for cfar detection | ||
| omni:sensor:WpmDmat:scan:__INSTANCE_NAME__:cfarOffset | float | 1.0 |
| cfar threshold offset value (multiplier) | ||
| omni:sensor:WpmDmat:scan:__INSTANCE_NAME__:cfarRnG | uint | 0 |
| cfar number of guard cells for the scan in range dimension | ||
| omni:sensor:WpmDmat:scan:__INSTANCE_NAME__:cfarRnT | uint | 1 |
| cfar number of test cells for the scan in range dimension | ||
| omni:sensor:WpmDmat:scan:__INSTANCE_NAME__:cfarVnG | uint | 0 |
| cfar number of guard cells for the scan in velocity dimension | ||
| omni:sensor:WpmDmat:scan:__INSTANCE_NAME__:cfarVnT | uint | 1 |
| cfar number of test cells for the scan in velocity dimension | ||
| omni:sensor:WpmDmat:scan:__INSTANCE_NAME__:detValFromBinIdx | bool | 0 |
| calculate detection value from bin index of the detection peak | ||
| omni:sensor:WpmDmat:scan:__INSTANCE_NAME__:elBins | uint | 2 |
| number of elevation bins of the scan | ||
| omni:sensor:WpmDmat:scan:__INSTANCE_NAME__:elevMode | token | "FULL_EL" |
| Allowed tokens: "NO_EL", "POS_EL", "FULL_EL" elevation mode | ||
| omni:sensor:WpmDmat:scan:__INSTANCE_NAME__:enAngAliasing | bool | 0 |
| enable angular aliasing | ||
| omni:sensor:WpmDmat:scan:__INSTANCE_NAME__:maxAzAngDeg | float | 66.0 |
| max azimuth angle of the scan in degrees; Runtime changes not supported, yet. | ||
| omni:sensor:WpmDmat:scan:__INSTANCE_NAME__:maxElAngDeg | float | 20.0 |
| max elevation angle of the scan in degrees; Runtime changes not supported, yet. | ||
| omni:sensor:WpmDmat:scan:__INSTANCE_NAME__:maxRangeM | float | 200.0 |
| max detection range of the scan in meters | ||
| omni:sensor:WpmDmat:scan:__INSTANCE_NAME__:maxVelMpsSequence | float[] | [50, 55] |
| max unambiguous velocity sequence of the scan in meters per second | ||
| omni:sensor:WpmDmat:scan:__INSTANCE_NAME__:powerFactor | float | 1.0 |
| power factor for the scan tx power | ||
| omni:sensor:WpmDmat:scan:__INSTANCE_NAME__:rangeNoiseMean | float | 0.0 |
| mean value of the range noise in meters | ||
| omni:sensor:WpmDmat:scan:__INSTANCE_NAME__:rangeNoiseSDev | float | 0.0 |
| standard deviation of the range noise in meters | ||
| omni:sensor:WpmDmat:scan:__INSTANCE_NAME__:rangeResM | float | 0.4 |
| range resolution of the scan in meters | ||
| omni:sensor:WpmDmat:scan:__INSTANCE_NAME__:raysPerDeg | float | 8.0 |
| ray tracing density; Runtime changes not supported, yet. | ||
| omni:sensor:WpmDmat:scan:__INSTANCE_NAME__:rBins | uint | 112 |
| number of range bins of the scan | ||
| omni:sensor:WpmDmat:scan:__INSTANCE_NAME__:rcsTuningCoefficients | float[] | [-12, 150, 0] |
| RCS tuning polynomial coefficients. 0: detections with RCS in dBsm lower than this threshold will be removed; 1: multiplied with RCS before conversion to dBsm. Set to 1 if no change is needed; 2: standard deviation of rcs noise in dBsm. Set to 0 if no noise is needed. | ||
| omni:sensor:WpmDmat:scan:__INSTANCE_NAME__:timeOffsetUsec | uint | 0 |
| time offset of the scan from the frame time to simulate non-equidistant scans | ||
| omni:sensor:WpmDmat:scan:__INSTANCE_NAME__:vBins | uint | 160 |
| number of velocity bins of the scan | ||
| omni:sensor:WpmDmat:scan:__INSTANCE_NAME__:velResMps | float | 0.147 |
| velocity resolution of the scan in meters per second | ||
OmniSensorsDepthSensorSingleViewAPI#
API Defines generic depth sensor camera using Core model
| Name | Type | Default |
|---|---|---|
| omni:rtx:post:depthSensor:baselineMM | float | 55.0 |
| Distance between the two cameras in millimeters. | ||
| omni:rtx:post:depthSensor:confidenceThreshold | float | 0.95 |
| Threshold for confidence filtering. | ||
| omni:rtx:post:depthSensor:enabled | bool | 0 |
| Enable stereo disparity generation. | ||
| omni:rtx:post:depthSensor:focalLengthPixel | float | 897.0 |
| Focal length of the camera in pixels. | ||
| omni:rtx:post:depthSensor:maxDisparityPixel | float | 110.0 |
| Maximum disparity value in pixels. | ||
| omni:rtx:post:depthSensor:maxDistance | float | 1e+07 |
| Maximum distance for disparity generation. | ||
| omni:rtx:post:depthSensor:minDistance | float | 0.5 |
| Minimum distance for disparity generation. | ||
| omni:rtx:post:depthSensor:noiseDownscaleFactorPixel | float | 1.0 |
| Factor to downscale noise texture in pixels. | ||
| omni:rtx:post:depthSensor:noiseMean | float | 0.25 |
| Mean value for noise generation. | ||
| omni:rtx:post:depthSensor:noiseSigma | float | 0.25 |
| Standard deviation for noise generation. | ||
| omni:rtx:post:depthSensor:outlierRemovalEnabled | int | 3 |
| Samples separated by this range (in pixels) will be removed. | ||
| omni:rtx:post:depthSensor:rgbDepthOutputMode | int | 0 |
| RGB output mode. | ||
| omni:rtx:post:depthSensor:sensorSizePixel | float | 1280.0 |
| Size of the camera sensor in pixels. | ||
| omni:rtx:post:depthSensor:showDistance | bool | 0 |
| Show distance for disparity generation. | ||